Аналитическая геометрия
Contents
\(\newcommand{\block}[2]{\begin{#1} #2 \end{#1}}\) \(\newcommand{\cases}[1]{\block{cases}{#1}}\) \(\newcommand{\up}[2]{\stackrel{#1}{#2}}\) \(\def\dn#1#2{\mathrel{\mathop{#2}\limits_{#1}}}\) \(\def\ident{\Longleftrightarrow}\) \(\def\thus{\Rightarrow}\) \(\newcommand{\set}[1]{ \{ #1 \} }\) \(\newcommand{\bigset}[1]{ \left \{ #1 \right \} }\) \(\newcommand{\bracs}[1]{ ( #1 ) }\) \(\newcommand{\bigbracs}[1]{ \left ( #1 \right ) }\) \(\newcommand{\bkets}[1]{\langle #1 \rangle}\) \(\newcommand{\bigbkets}[1]{\left \langle #1 \right \rangle}\) \(\newcommand{\mat}[1]{\block{Vmatrix}{#1}}\) \(\newcommand{\det}[1]{\block{vmatrix}{#1}}\) \(\newcommand{\pmat}[1]{\block{pmatrix}{#1}}\) \(\newcommand{\emat}[1]{\block{matrix}{#1}}\) \(\renewcommand{\geq}{\geqslant}\) \(\renewcommand{\leq}{\leqslant}\) \(\newcommand{\upline}[1]{\overline{#1}}\) \(\newcommand{\dnline}[1]{\underline{#1}}\) \(\def\ex{\exists}\) \(\def\exo{\ex!}\) \(\renewcommand{\fal}{\forall}\) \(\renewcommand{\int}{\intop}\) \(\def\inf{\infty}\) \(\renewcommand{\tg}{\tan}\) \(\renewcommand{\phi}{\varphi}\) \(\renewcommand{\epsilon}{\varepsilon}\) \(\def\alp{\alpha}\) \(\def\lam{\lambda}\) \(\def\gam{\gamma}\) \(\def\eps{\epsilon}\) \(\def\sig{\sigma}\) \(\newcommand{\NN}{\mathbb{N}}\) \(\newcommand{\ZZ}{\mathbb{Z}}\) \(\newcommand{\RR}{\mathbb{R}}\) \(\newcommand{\CC}{\mathbb{C}}\) \(\newcommand{\FF}{\mathbb{F}}\) \(\newcommand{\QQ}{\mathbb{Q}}\) \(\newcommand{\EE}{\mathbb{E}}\) \(\newcommand{\UU}{\mathcal{U}}\) \(\newcommand\E{\mathbbold{e}}\) \(\newcommand\F{\mathbbold{f}}\) \(\newcommand\G{\mathbbold{g}}\) \(\newcommand{\rawOlim}[3]{\dn{{#1}\rightarrow{#2}}{#3}}\) \(\newcommand{\lim}[2]{\rawOlim{#1}{#2}{lim}}\) \(\newcommand{\uplim}[2]{\rawOlim{#1}{#2}{\upline{lim}}}\) \(\newcommand{\dnlim}[2]{\rawOlim{#1}{#2}{\dnline{lim}}}\) \(\newcommand{\norm}[1]{\left \lVert #1 \right \rVert}\) \(\newcommand{\ord}[1]{\operatorname{ord}(#1)}\) \(\newcommand{\ans}[1]{\textbf{Ответ}: #1.}\) \(\renewcommand{\gcd}{\text{НОД}}\) \(\newcommand{\lcm}{\text{НОК}}\) \(\newcommand{\proj}[2]{\text{пр.}_{#1}{#2}}\) \(\newcommand{\U}[2]{U_{#1}(#2)}\)
Аналитическая геометрия#
Аналитическая геометрия
-
-
Переход от общих уравнений прямой к каноническому в пространстве
Угол между прямыми, условие параллельности и перпендикулярности прямых в пространстве.
Условие параллельности и перпендикулярности прямой и плоскости в пространстве
Условие прохождения трех различных плоскостей через одну и только одну точку.
Преподаватель - Михайлов Владислав Дмитриевич
Конспект : Руденький Н.В., Б\(22\)-В\(71\).
Литература#
Лекция 02.09.2022#
Векторы#
Определение
Вектор - это направленный отрезок.
Длина вектора \(|\vec{AB}|\)
Краткая запись \(|\vec{a}|\)
Факт
Векторы коллинеарны, если они лежат на параллельных прямых или на одной прямой
Факт
Два вектора называются равными, если равны их длины (модули) и они коллинеарны и соноправлены
Факт
Если два вектора коллинеарны, то они отличаются на константу.
Свойства
Сложение
По правилу треугольника
По правилу паралелограмма
\( \vec{a} + \vec{b} = \vec{b} + \vec{a}\)
- \[ \vec{a} + (\vec{b} + \vec{c}) = (\vec{a} + \vec{b}) + \vec{c} \]
- \[\exists \vec{0} : \vec{a} + \vec{0} = \vec{a}\]
- \[\forall \vec{v} \in \RR^3 : \exists \vec{v}^{-1} : \vec{v} + \vec{v}^{-1} = \vec{0} \]
Вектором \(\lambda \vec{a}\) называется вектор, такой что : \(|\lambda\vec{a}| = |\lambda||\vec{a}|\)
Вектор \(\lambda \vec{a}\) коллинеарен вектору \(\vec{a}\) и сонаправлен, если \(\lambda \geq 0\)
Алгебраические свойства
Умножение векторов на константу
\( \lambda (\vec{a} + \vec{b}) = \lambda\vec{b} + \lambda\vec{a}\)
\( (\lambda + \mu)\vec{a} = \lambda\vec{a} + \mu\vec{b}\)
\(\lambda(\mu\vec{a}) = (\lambda\mu)\vec{a}\)
Линейная зависимость системы векторов#
\(\vec{v} = \alpha_{1} \vec{a}_{1} + \alpha_{2} \vec{a}_{2} + ... + \alpha_{n} \vec{a}_{n}\) - линейная комбинация
Система линейно зависима, если для линейной комбинации существует \(\alpha \in {\alpha_{1}, \alpha_{2}, ... , \alpha_{n}}\) такой, что \(\alpha \neq 0\)
Доказательство : пусть \(\alpha_{i} \neq 0\) и линейная комбинация равна нулю.
\(\alpha_{1} \vec{a}_{1} + \alpha_{2} \vec{a}_{2} + ... + \alpha_{i - 1} \vec{a}_{i - 1} + \alpha_{i} \vec{a}_{i} + ... + \alpha_{n} \vec{a}_{n} = 0\)
\(\alpha_{i} \vec{a}_{i} = - \alpha_{1} \vec{a}_{1} - \alpha_{2} \vec{a}_{2} ... - \alpha_{i - 1} \vec{a}_{i - 1} ... - \alpha_{n} \vec{a}_{n}\)
т.к. \(\alpha_{i} \neq 0\), то можно разделить обе части на \(\alpha_{i}\)
Получим: \(\vec{a}_{i} = -\dfrac{\alpha_{1}}{\alpha_{i}}\vec{a}_{1} - -\dfrac{\alpha_{2}}{\alpha_{i}}\vec{a}_{2} - ... - -\dfrac{\alpha_{i - 1}}{\alpha_{i}}\vec{a}_{i - 1} ... -\dfrac{\alpha_{n}}{\alpha_{i}}\vec{a}_{n}\)
Назовем коэффициенты при \(\vec{a}_{i}:\) \(\lambda_{i}\), тогда \(\vec{a}_{i} = \lambda_{1} \vec{a}_{1} + \lambda_{2} \vec{a}_{2} + ... + \lambda_{i - 1} \vec{a}_{i - 1} + ... + \lambda_{n} \vec{a}_{n}\)
Получим представление \(\vec{a}_{i}\) в виде остальных векторов
Достаточное условие линейной зависимости#
Теорема
Если в системе векторов присутсвует нулевой вектор, то система линейно зависима.
Факт
Если часть векторов системы линейно зависима, то и остальные векторы линейно зависимы
Факт
Если система векторов не является линейно зависимой, то она линейно независима.
Теорема
Система линейно независима, если единственная ее линейная комбинация равна нулю.
Следствие
Два вектора линейно зависимы тогда и только тогда, когда они колинеарны
Если \(\vec{a} = \lambda\vec{b}\), то векторы коллинеарны, это и есть линейная зависимость.
\(3\) вектора линейно зависимы тогда и только тогда, когда они компланарны (лежат в одной или параллельных плоскостях)
Упражнение
Пусть \(\vec{a}, \vec{b}, \vec{c} \) - линейно зависимы. Доказать компланароность \(\{\vec{a}, \vec{b}, \vec{c}\}\). Доказательство : По определению линейной зависимости \(\vec{a} = \lambda \vec{b} + \gamma\vec{c}\), тогда \(\vec{a}\) лежит в одной плоскости, по правилу паралелограмма. Обратно : Пусть \(\vec{a}, \vec{b}, \vec{c} \) - компланарны. Доказать их линейную зависимость.
Доказательство : так как векторы лежат в одной плоскости, можно представить один вектор из системы в виде суммы двух других.
Утверждение
Любые 4 вектора линейно зависимы в трехмерном пространстве.
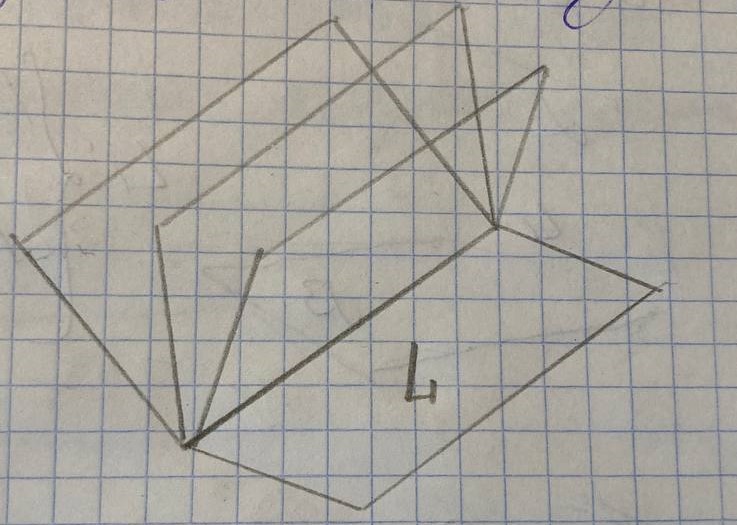
Доказательство : Пусть даны произвольные 4 вектора \(\vec{a}, \vec{b}, \vec{c}, \vec{d}\). Приведем к одному началу эти векторы. На любой тройке этих векторов образуем куб \(ABCDA'B'C'D'\). В нем
\(\vec{AC} = \vec{AB} + \vec{BC}\)
\(\vec{AC'} = \vec{AC} + \vec{AA'}\)
\(\vec{AC'} = \vec{AB} + \vec{BC} + \vec{AA'}\) . Где \(\vec{AB} = \alpha\vec{a}, {BC} = \beta \vec{b}, \vec{AA'} = \gamma \vec{c}\).
Получим \(\vec{AC'} = D\). Вывод : \(D = \alpha\vec{a} + \beta \vec{b} + \gamma \vec{b}\). Следовательно \(\{\vec{D}, \vec{a}, \vec{b}, \vec{c}\}\) - линейно зависима.
Определение
Базисом в трехмерном пространстве называется система из трех линейно независимых (неколлинеарных) векторов. Любой вектор соответствующего пространства может быть разложен и при том единственным образом. Коэффициенты этого разложения называются координатами вектора в этом базисе
Упражнение
Дано \(\{\vec{a}, \vec{b}, \vec{c}\}\) - Базис. Тогда \(v \in \RR^3 : v = \alpha\vec{a} + \beta\vec{b} + \gamma\vec{c}.\) \((\alpha, \beta, \gamma)\) - коэффициенты вектора \(v\) в базисе \(\{\vec{a}, \vec{b}, \vec{c}\}\)
Определение
Ортонормированный базис - базис из попарно перпендикулярных (ортогональных) векторов длины 1. Такие векторы принято называть \(\vec{i}, \vec{j}, \vec{k}\).
Следствие
\(\vec{a} = X\vec{i} + Y\vec{j} + Z\vec{k}\), \(X, Y, Z \) - проекции.
\(X^2 + Y^2 + Z^2 = |\vec{a}|^2 \\ \)
\(\cos{\alpha}^2 + \cos{\beta}^2 + \cos{\gamma}^2 = 1\)
Лекция 09.09.2022#
Направляющие косинусы вектора#
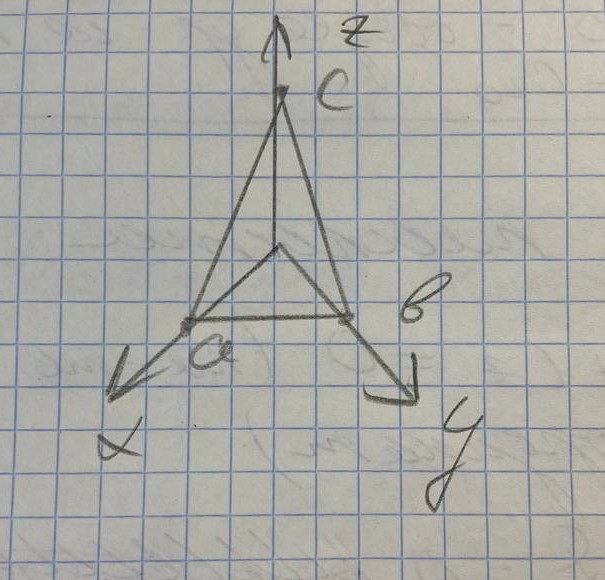
Пусть \(\{\vec{a}, \vec{b}, \vec{c}\}\) - ортогональный базис в трехмерном постранстве. Построим паралелепипед \(ABCDA'B'C'D'\) на этом наборе векторов. Тогда \(\vec{d} = \alpha \vec{a} + \beta \vec{b} + \gamma \vec{c}\)
\(pr_{x}{\vec{d}} = X\)
\(pr_{y}{\vec{d}} = Y\)
\(pr_{z}{\vec{d}} = Z\)
С другой стороны :
\(X = |d| \cos{\alpha}\)
\(Y = |d| \cos{\beta}\)
\(Z = |d| \cos{\gamma}\)
Получим : \(X^2 + Y^2 + Z^2 = |d|^2(\cos{\alpha}^2 + \cos{\beta}^2 + \cos{\gamma}^2) \Rightarrow \cos{\alpha}^2 + \cos{\beta}^2 + \cos{\gamma}^2 = 1\)
Скалярное произведение векторов#
Определение
Пусть даны два вектора \(\vec{a}, \vec{b}\). Скалярным произведенимем этих векторов называют число, такое что \((\vec{a}, \vec{b}) = |\vec{a}||\vec{b}|\cos{\alpha}\)
Альтернативное определение через проекции.
Пусть даны два вектора \(\vec{a}, \vec{b}\) , выходящие из одного начала \(O\), с концами в точках \(A\) и \(B\). Тогда построим перпендикуляр к \(\vec{b}\) из \(A\). Получим перпендикуляр \(AA'\). \(OA' = pr_{\vec{b}}{\vec{a}} = |\vec{a}| \cos{\alpha} \Rightarrow (\vec{a}, \vec{b}) = |\vec{a}| pr_{\vec{a}}{\vec{b}} = |\vec{b}| pr_{\vec{b}}{\vec{a}}\)
Алгебраические свойства
\((\vec{a}, \vec{b}) = (\vec{b}, \vec{a})\)
\((\vec{a} + \vec{b}, \vec{c}) = (\vec{a}, \vec{c}) + (\vec{b}, \vec{c})\)
\((\lambda \vec{a}, \vec{b}) = \lambda (\vec{a}, \vec{b})\)
\((\vec{a}, \vec{a}) = \vec{a}^2 = |\vec{a}|^2\)
Упражнение
Докажем \((2)\):
\((\vec{a}, \vec{c}) = |c|pr_{\vec{c}}{\vec{a}}\)
\((\vec{b}, \vec{c}) = |c|pr_{\vec{b}}{\vec{a}}\)
\((\vec{a} + \vec{b}, \vec{c}) = |c|pr_{\vec{c}}{\vec{a} + \vec{b}} = |c|(pr_{\vec{c}}{\vec{a}} + pr_{\vec{c}}{\vec{b}})\)
Геометрические свойства
\(\vec{a} \perp \vec{b} \Rightarrow (\vec{a}, \vec{b}) = 0\). Стоит заметить что обратно не следует в том случае, если \(\vec{a} = \vec{0}\) или \(\vec{b} = \vec{0}\)
\(\phi < 90 \Rightarrow (\vec{a}, \vec{b}) > 0\) \(\textbf{Вытекает из определения скаляного произведения}\)
\(\phi > 90 \Rightarrow (\vec{a}, \vec{b}) < 0 \) \(\textbf{Вытекает из определения скаляного произведения}\)
Определение
\(\cos{\phi} = \dfrac{(\vec{a}, \vec{b})}{|\vec{a}| |\vec{b}| }\)
Упражнение
Выразим скалярное произведение через координаты перемножаемых векторов. Рассмотрим векторы \(\vec{a}, \vec{b}, \vec{c}\) в базисе \(\{\vec{i}, \vec{j}, \vec{k}\}\).
Тогда :
\(\vec{a} = X_{1}\vec{i} + Y_{1}\vec{j} + Z_{1}\vec{k}\)
\(\vec{b} = X_{2}\vec{i} + Y_{2}\vec{j} + Z_{2}\vec{k}\)
\((\vec{a}, \vec{b}) = (X_{1}\vec{i} + Y_{1}\vec{j} + Z_{1}\vec{k}, X_{2}\vec{i} + Y_{2}\vec{j} + Z_{2}\vec{k})\). Т.к. \(\{\vec{i}, \vec{j}, \vec{k}\}\) - ортонормированный, то \((\vec{i}, \vec{j}) = (\vec{i}, \vec{k}) = (\vec{j}, \vec{k}) = 0\), а \((\vec{i}, \vec{i}) = (\vec{k}, \vec{k}) = (\vec{j}, \vec{j}) = 1\) \(\Rightarrow (\vec{a}, \vec{b}) = X_{1}X_{2}(\vec{i}, \vec{i}) + Y_{1}Y_{2}(\vec{k}, \vec{k}) + Z_{1}Z_{2}(\vec{j}, \vec{j}) =X_{1}X_{2} + Y_{1}Y_{2} + Z_{1}Z_{2}\)
Скалярное произведение можно рассматривать как произведение силы \(F\) на путь \(AB\). \(\vec{F} = |F||AB|\cos{\phi}\).
Векторное произведение векторов#
Обозначение
\([\vec{a}, \vec{b}]\)
Определение
\([\vec{a}, \vec{b}]\) - вектор, такой что: \(|[\vec{a}, \vec{b}]| = |\vec{a}||\vec{b}| \sin \phi\). Кроме того этот вектор \(\perp\) плоскости перемножаемых векторов.
Определение
Векторы \(\vec{a}, \vec{b}, \vec{c}\) образуют правую тройку, если с конца \(\vec{a}\) вращение от \(\vec{b}\) к \(\vec{c}\) по кратчайшему направлению предоставляется происходящим против часовой стрелки, при условии приведения к одному началу.
Тут показывать надо, но попробую описать словами: берем правую руку, и нумеруем пальцы начиная с большого (большой — первый вектор, указательный — второй, средний — третий). Такую тройку векторов назовём «правой».Аналогично можно сделать для левой руки. Суть в том, что никакую правую тройку векторов невозможно перевести в левую (так чтобы в процессе тройка оставалось базисом)
Пример
\(\{[\vec{a}, \vec{b}], \vec{a}, \vec{b}\}\) является правой тройкой векторов.
Геометрические свойства.
Если \(\vec{a}, \vec{b}\) - коллинеарны, то \([\vec{a}, \vec{b}] = \vec{0}.\) Т.к \([\vec{a}, \vec{b}] = |\vec{a}||\vec{b}| \sin{\phi}\). \(\phi = 0\) или \(\phi = \pi \Rightarrow \sin{\phi} = 0\).
\( \textbf{Геометрический смысл.}\) \(|[\vec{a}, \vec{b}]| = S_{AB} \). \([\vec{a}, \vec{b}]\) = \(S_{AB} \vec{e} \). Где \(AB\) - паралелограмм, образованный на \(\{\vec{a}, \vec{b}\}\), а \(\vec{e}\) - единичный вектор вдоль \([\vec{a}, \vec{b}]\).
Алгебраические свойства
\([\vec{a}, \vec{b}] = - [\vec{b}, \vec{a}]\). Следует из ориентации.
\([\vec{a} + \vec{b}, \vec{c}] = [\vec{a}, \vec{c}] + [\vec{b}, \vec{c}]\). Распределительное свойство.
\([\vec{a}, \vec{a}] = \vec{0}\). \((\vec{a}\) - коллинеарен \(\vec{a})\)
Смешанное произведение векторов#
Определение
\(([\vec{a}, \vec{b}], \vec{c})\)
Геометрическое свойство
\(([\vec{a}, \vec{b}], \vec{c}) = V_{ABCDA'B'C'D'}\). Где \(ABCDA'B'C'D'\) - паралелепипед, построенный на тройке \(\{\vec{a}, \vec{b}, \vec{c}\}\). (Взят с плюсом, если тройка правая и с минусом иначе).
Упражнение
Докажем : \(([\vec{a}, \vec{b}], \vec{c}) = V_{ABCDA'B'C'D'}\)
Действительно, \([\vec{a}, \vec{b}]\) - есть \(\perp\) к плоскости \(A_{\vec{b}, \vec{a}} \Rightarrow [\vec{a}, \vec{b}] = S_{AB}\).
\(([\vec{a}, \vec{b}], \vec{c}) = |\underbrace{[\vec{a}, \vec{b}]}_{S_{AB}}||\vec{c}|\cos{\gamma} = |[\vec{a}, \vec{b}]| \cdot pr_{[\vec{a}, \vec{b}]}(c) = V_{ABCDA'B'C'D'}\)
Следствие
\(([\vec{a}, \vec{b}], \vec{c}) = (\vec{a}, [\vec{b}, \vec{c}]) = (\vec{a}, \vec{b}, \vec{c})\)
Свойства смешанного произведения векторов
\((\vec{a}, \vec{b}, \vec{b}) = (\vec{a}, [\vec{b}, \vec{b}] = \vec{0}) = 0\)
Необходимое и достаточное условие компланарности трех векторов : \((\vec{a}, \vec{b}, \vec{c}) = 0\).
Выражение векторного произведения через координаты перемножаемых векторов. Пусть:
\(\vec{a} = X_{1}\vec{i} + Y_{1}\vec{j} + Z_{1}\vec{k}\)
\(\vec{b} = X_{2}\vec{i} + Y_{2}\vec{j} + Z_{2}\vec{k}\)
\([\vec{a}, \vec{b}] = [X_{1}\vec{i} + Y_{1}\vec{j} + Z_{1}\vec{k}, X_{2}\vec{i} + Y_{2}\vec{j} + Z_{2}\vec{k}]= X_{1}X_2\underbrace{[\vec{i}, \vec{i}]}_{\vec{0}} + X_{1}Y_2\underbrace{[\vec{i}, \vec{j}]}_{\vec{k}} + Z_{1}Z_2\underbrace{[\vec{k}, \vec{k}]}_{\vec{0}} + X_{1}Z_{2}\underbrace{[\vec{i}, \vec{k}]}_{-\vec{j}} + Y_{1}Y_2\underbrace{[\vec{j}, \vec{j}]}_{\vec{0}} + Y_{1}Z_{2}\underbrace{[\vec{j}, \vec{k}]}_{\vec{i}} \dots =\)
\(\begin{equation*} \begin{vmatrix} \vec{i} & \vec{j} & \vec{k} \\ X_{1} & Y_{1} & Z_{1} \\ X_{2} & Y_{2} & Z_{2} \end{vmatrix} = \vec{i} \cdot \begin{vmatrix} Y_{1} & Z_{1} \\ Y_{2} & Z_{2} \end{vmatrix} -\vec{j} \cdot \begin{vmatrix} X_{2} & Z_{1} \\ X_{2} & Z_{2} \end{vmatrix} + \vec{k} \cdot \begin{vmatrix} X_{1} & Y_{1} \\ X_{2} & Y_{2} \end{vmatrix} \end{equation*}\)
Свойства
\(\vec{a} = X_{1}\vec{i} + Y_{1}\vec{j} + Z_{1}\vec{k}\)
\(\vec{b} = X_{2}\vec{i} + Y_{2}\vec{j} + Z_{2}\vec{k}\)
\(\vec{c} = X_{3}\vec{i} + Y_{3}\vec{j} + Z_{3}\vec{k}\)
Получим :
\( \begin{equation*} (\vec{a}, \vec{b}, \vec{c}) = ([\vec{a}, \vec{b}], \vec{c}) \Rightarrow (\vec{a}, \vec{b}, \vec{c}) = \begin{vmatrix} X_{1} & Y_{1} & Z_{1} \\ X_{2} & Y_{2} & Z_{2} \\ X_{3} & Y_{3} & Z_{3} \end{vmatrix} \end{equation*}\)
Упражнение
С помощью смешанного произведения легко доказываются свойства векторного произвдения}
Тривиально
Умножим скалярно обе части на \(\vec{b}\). \(([\vec{a} + \vec{b}, \vec{c}], \vec{b}) = ([\vec{a}, \vec{c}], \vec{b}) + \underbrace{([\vec{b}, \vec{c}], \vec{b})}_{0}\). Поскольку \(\{[\vec{a} + \vec{b}, \vec{c}], \vec{a}, \vec{b}\} \perp \vec{c}\), значит они компланарны \(\Rightarrow\) один из них - линейная комбинация двух других \(\Rightarrow S_{[\vec{a} + \vec{b}, \vec{c}]} = S_{[\vec{a}, \vec{c}]} + S_{[\vec{b}, \vec{c}]}\)
Лекция 24.09.2022#
Алгебраическое выражение геометрических образов#
Рассмотрим задачу:
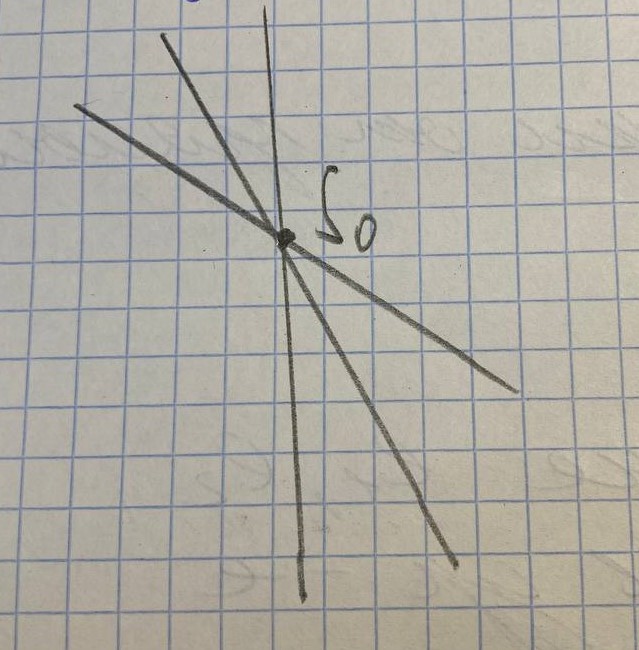
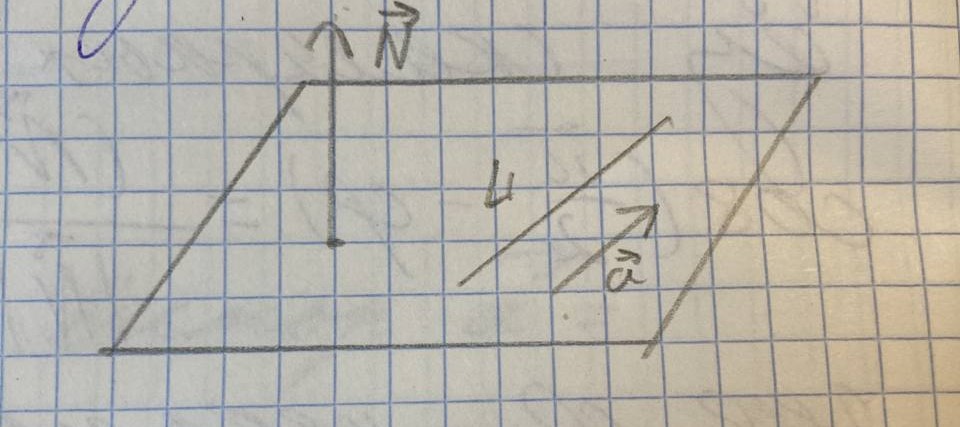
В прямоугольной декартовой системе координат на плоскости получить уравнение прямой, проходящей через данную точку \(M_{0}(x_{0}, y_{0})\), перпендикулярной данному вектору \(\vec{N}(A; B)\).
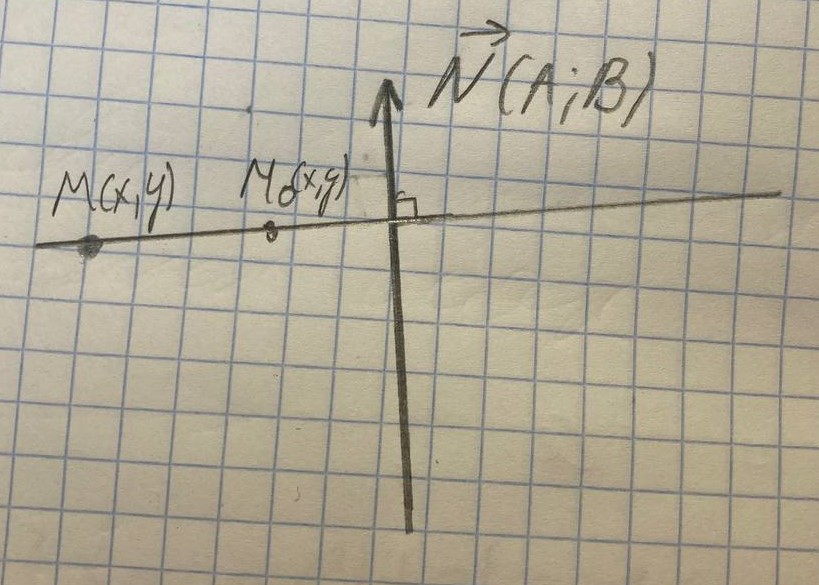
Возьмем точку с текущими координатами \(M(x, y)\)
Необходимое и достаточное условие принадлежности точки \(M(x, y)\) указанной прямой есть равенство скалярного произведения \((\vec{N}, M_{0}M) = 0\). \(\vec{N} = (A; B), M_{0}M = (x - x_{0}, y - y_{0})\).
Получим \(A(x - x_{0}) + B(y - y_{0}) = 0\)
Определение нормали
Любой вектор, перпендикулярный прямой называется ее нормальным вектором или нормалью.
Общее уравнение прямой#
Раскроем \(A(x - x_{0}) + B(y - y_{0}) = 0\)
\(Ax + By + \underbrace{- Ax_{0} - By_{0}}_{C} = 0\)
\(Ax + By + C= 0\)
Неполные уравнения прямой#
\(C = 0\), \(A \neq 0\), \(B \neq 0 \implies Ax + By = 0 \implies y = -\dfrac{A}{B}x \implies y = kx\), \(k\) - угловой коэффициент.
\(C = 0\), \(A = 0\), \(B \neq 0 \implies By = 0 \implies y = 0\). Получим уравнение оси \(Ox\).
\(C = 0\), \(A \neq 0\), \(B = 0 \implies Ax = 0 \implies x = 0\). Получим уравнение оси \(Oy\).
Определение координат нормали
\((A; B)\) - координаты нормали
Уравнение прямой в отрезках на координатных осях#
\(Ax + By + C= 0\)
\(Ax + By = - C\) \(| \cdot (- \dfrac{1}{C})\)
\(- \dfrac{A}{C}x - \dfrac{B}{C}y = 1\)
\(\dfrac{x}{\underbrace{-\dfrac{C}{A}}_{a}} + \dfrac{y}{\underbrace{-\dfrac{C}{B}}_{b}} = 1\)
\(\dfrac{x}{a} + \dfrac{y}{b} = 1\)
Уравнение прямой с угловым коэффициентом#
Пусть дан угол наклона прямой и оси \(Ox\), направленной в положительную сторону. Тогда \(\tan{\phi} = k\).
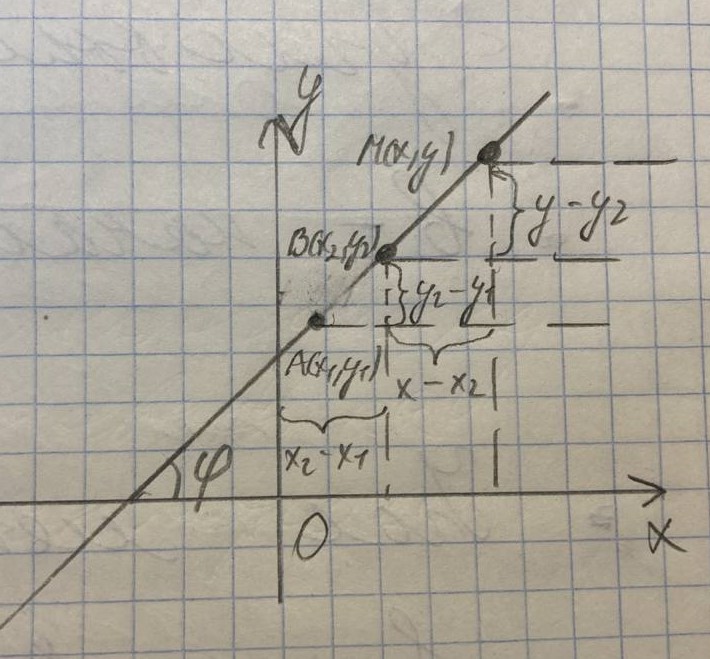
\(\tan{\phi} = \dfrac{y_{2} - y_{1}}{x_{2} - x_{1}}\)
\(\tan{\phi} = \dfrac{y - y_{2}}{x - x_{2}}\)
\(\dfrac{y_{2} - y_{1}}{x_{2} - x_{1}} = \dfrac{y - y_{2}}{x - x_{2}}\)
\(y - y_{2} = \dfrac{y_{2} - y_{1}}{x_{2} - x_{1}}(x - x_{2})\). Получим уравнение прямой, проходящей, через две точки.
\(y - y_{2} = \tan{\phi}(x - x_{2})\)
\(y - y_{2} = k(x - x_{2})\)
\(y = y_{2} + kx - kx_{2} = kx + y_{2} - kx_{2} = kx + b\). Получим уравнение прямой с угловым коэффициентом, где \(b\) - начальная ордината.
Угол между двумя прямыми#
Дано :
\(\ell_{1} : y = k_{1}x + b_{1}\)
\(\ell_{2} : y = k_{2}x + b_{2}\)
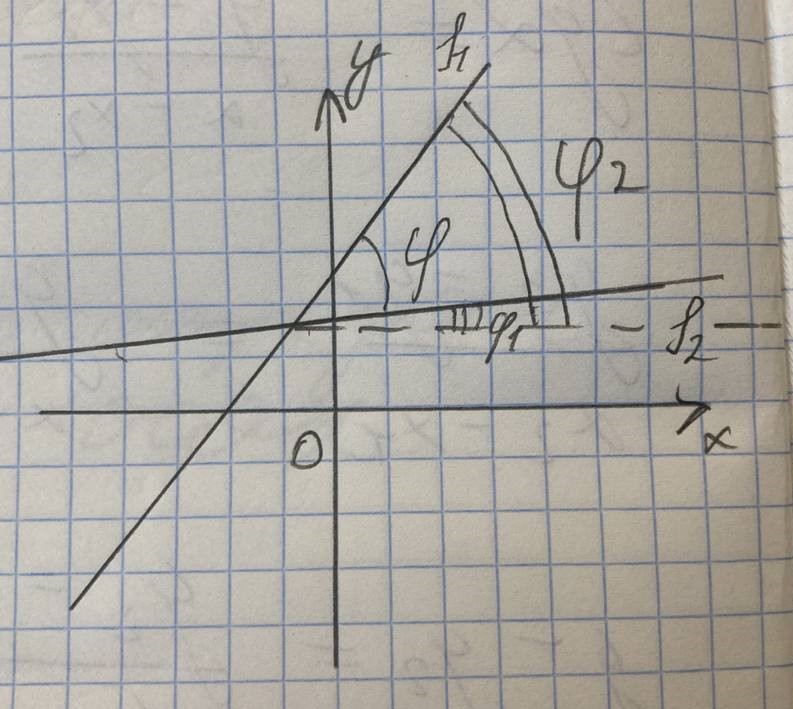
\(\phi = \phi_{2} - \phi_{1}\)
\(\tan{\phi} = \tan{(\phi_{2} - \phi_{1})} = \dfrac{\tan{\phi_{2}} - \tan{\phi_{1}}}{1 + \tan{\phi_{1}\tan{\phi_{2}}}} = \dfrac{k_{2} - k_{1}}{1 + k_{1}k_{2}}\).
Заметим, \((1 + k_{1}k_{2} = 0) \implies \phi = \dfrac{\pi}{2} \implies \ell_{1} \perp \ell_{2}\)
\((1 + k_{1}k_{2} = 0) \implies k_{1}k_{2} = -1 \implies k_{2} = -\dfrac{1}{k_{1}}\)
Условие перпендикулярности, исходя из общего уравнения#
Дано:
\(\ell_{1} : A_{1}x + B_{1}y + C_{1}= 0\)
\(\ell_{2} : A_{2}x + B_{2}y + C_{2}= 0\)
\((A_{1}; B_{1}) = \vec{N_{1}}\) - нормаль \(\ell_{1}\)
\((A_{2}; B_{2}) = \vec{N_{2}}\) - нормаль \(\ell_{2}\)
\((\vec{N_{1}}, \vec{N_{2}}) = 0\) - условие \(\ell_{1} \perp \ell_{2}\)
Определение угла между прямыми через нормали
\(\cos{\phi} = \dfrac{(\vec{N_{1}}, \vec{N_{2}})}{|\vec{N_{1}}|| \vec{N_{2}}|}\) - Угол между нормалями.
Каноническое уравнение прямой#
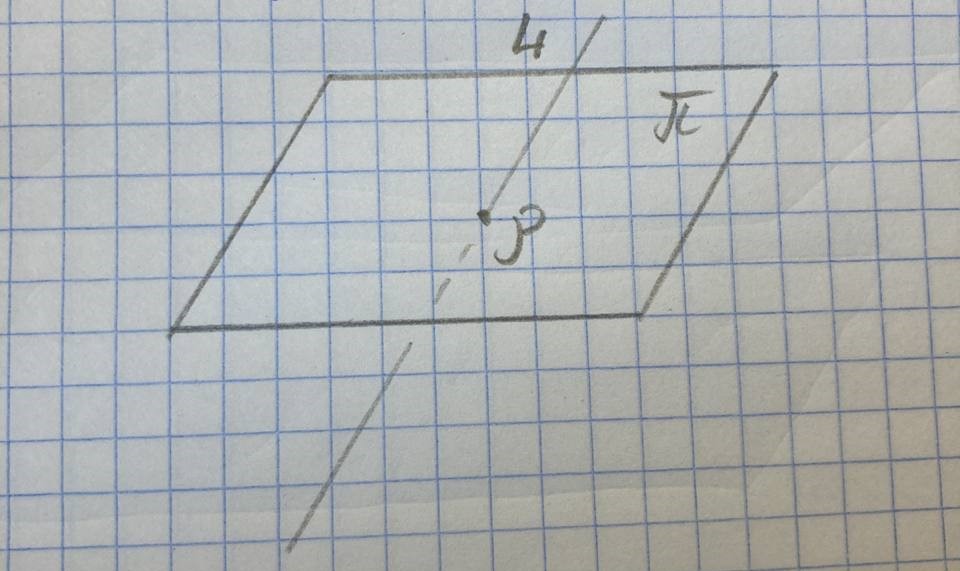
Через точку \(M_{0}(x_{0}, y_{0})\) проведем прямую, параллельную данному вектору \(\vec{a} = (l, m)\). Этот вектор называется направляющим вектором прямой \(\ell\).
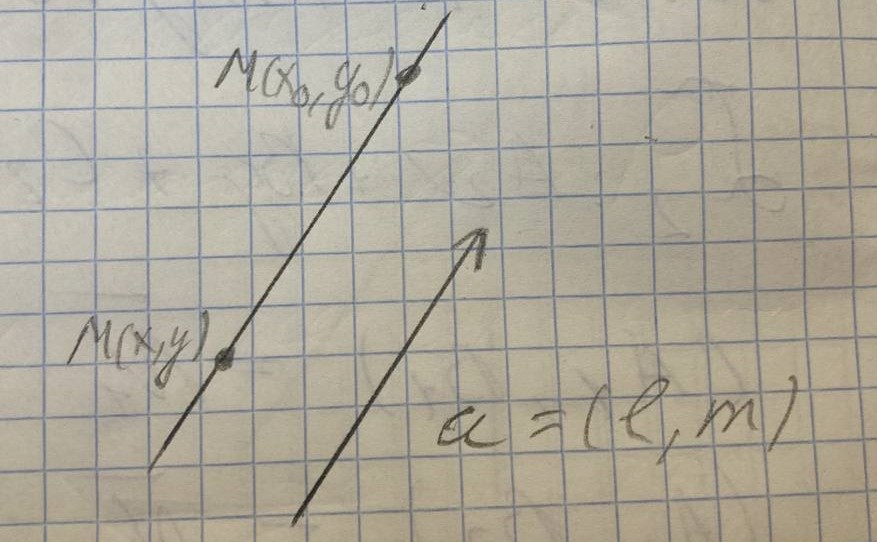
Условием принадлежности точки данной прямой является коллинеарность векторов \(\vec{M_{0}M}\) и \(\vec{a}\).
Каноническое уравнение прямой
Так как коллинеарные векторы отличаются на константу, то \(\vec{M_{0}M} = \lambda \vec{a}\):
\(\begin{equation*} \begin{cases} x - x_{0} = \lambda l\\ y - y_{0} = \lambda m \end{cases} \end{equation*} \implies\) \( \begin{equation*} \begin{cases} \lambda = \dfrac{x - x_{0}}{l} \\ \lambda = \dfrac{y - y_{0}}{m} \end{cases} \end{equation*} \implies \dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m}\)
Параметрическое уравнение прямой#
\( \dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = t\)
\( \begin{equation*} \begin{cases} \dfrac{x - x_{0}}{l} = t \\ \dfrac{y - y_{0}}{m} = t \end{cases} \end{equation*} \implies\) \(\begin{equation*} \begin{cases} x = x_{0} + lt \\ y = y_{0} + mt \end{cases} \end{equation*}\)
\(t\) можно трактовать, как время движения точки вдоль прямой.
Нормальное уравнение прямой#
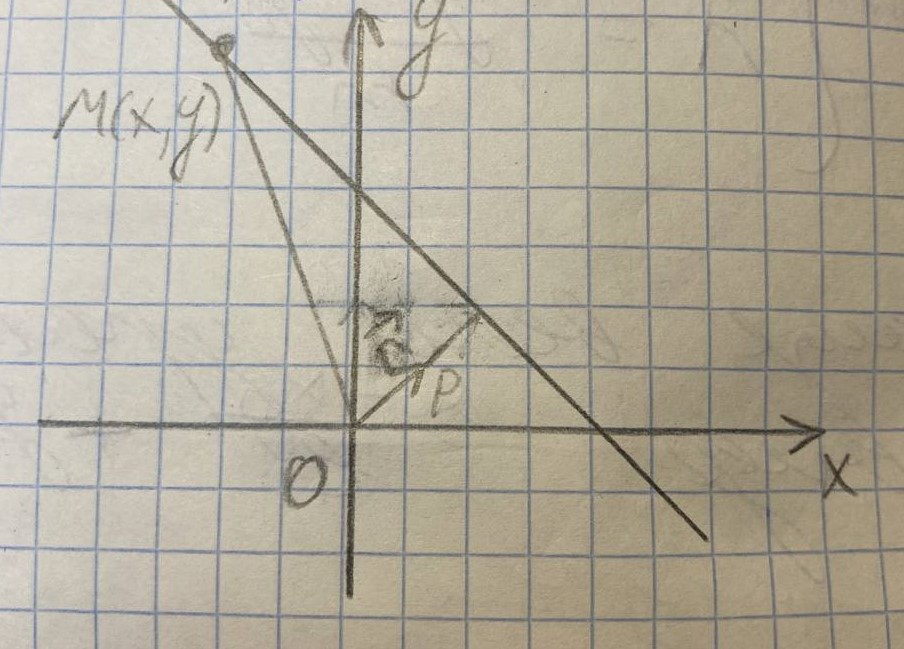
Необходимое и достаточное условие принадлежности точки данной: \(pr_{\vec{n}}(\vec{OM}) = p\) - это уже уравнение прямой. Выразим его в координатах.
\(pr_{\vec{n}}(\vec{OM}) = \dfrac{\left(\vec{OM}, \vec{n}\right)}{|\vec{n}|} = \left(\vec{OM}, \vec{n}\right) = x\cos{\phi} + y\sin{\phi} = p \implies x\cos{\phi} + y\sin{\phi} - p = 0\)
Нормальное уравнение прямой из ее общего уравнения
\(x\cos{\phi} + y\sin{\phi} - p = 0\)
\(Ax + By + C = 0\) \(|\left( \pm \dfrac{1}{\sqrt{A^2 + B^2}}\right)\)
\(\dfrac{A}{\sqrt{A^2 + B^2}}x + \dfrac{B}{\sqrt{A^2 + B^2}}y - \dfrac{C}{\sqrt{A^2 + B^2}} = 0 \implies \left(\dfrac{A}{\sqrt{A^2 + B^2}}\right)^2 + \left(\dfrac{B}{\sqrt{A^2 + B^2}}\right)^{2} + \left(\dfrac{C}{\sqrt{A^2 + B^2}}\right)^2 = 1\)
Пример
\(3x - 4y + 5 = 0\) \(|\cdot (- \dfrac{1}{5}) \implies - \dfrac{3}{5}x + \dfrac{4}{5}y - 1 = 0\)
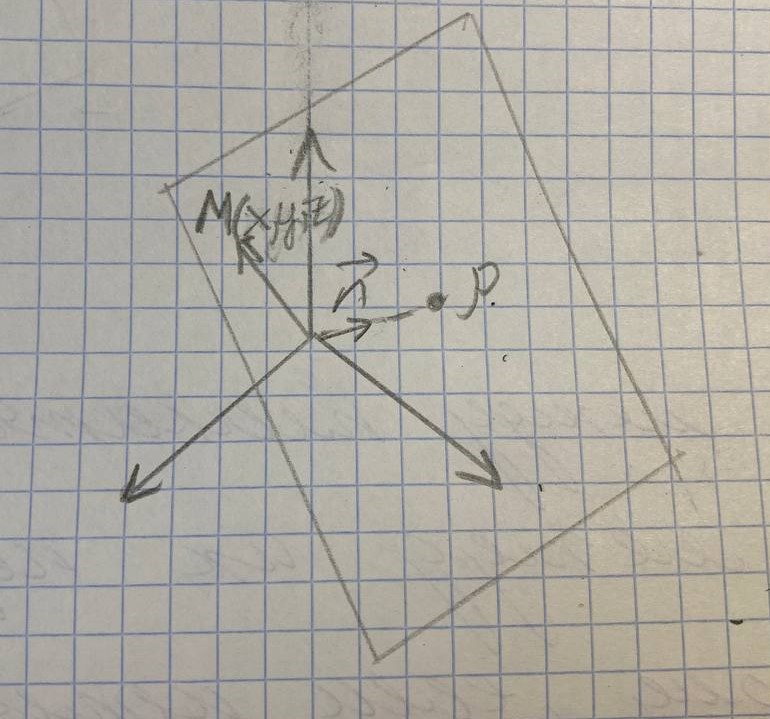
Применение нормального уравнения прямой для нахождения расстояния от данной точки до данной прямой#
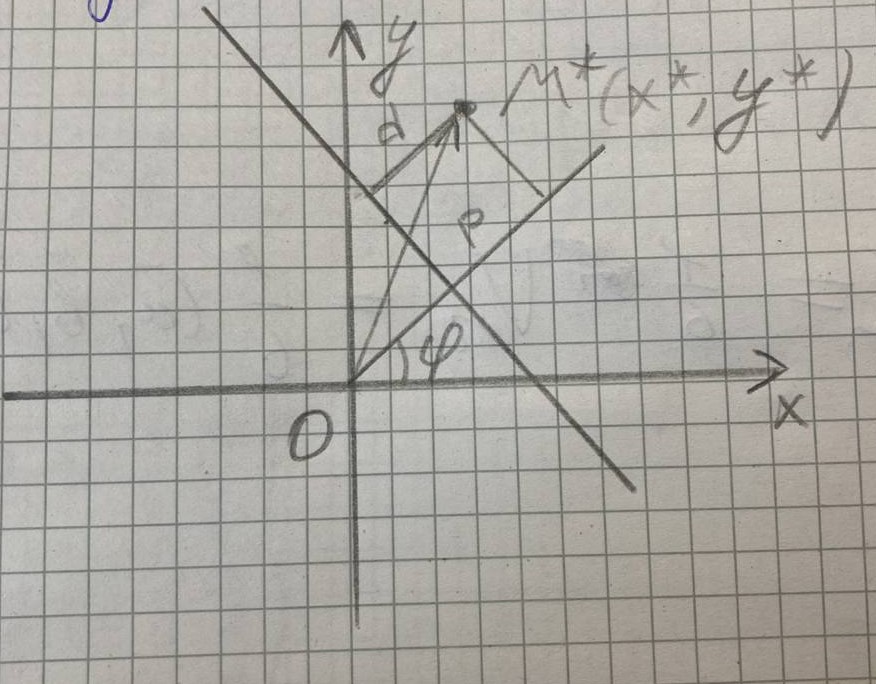
\(pr_{\vec{n}}(\vec{OM}) = \dfrac{(\vec{OM}, \vec{n})}{|\vec{n}|} = x^{\star} \cos{\phi} + y^{\star} \sin{\phi}\)
\(d = x^{\star} \cos{\phi} + y^{\star} \sin{\phi} - p\). Это верно, если \(M^{\star}\) и \(O\) лежат по разные стороны от прямой
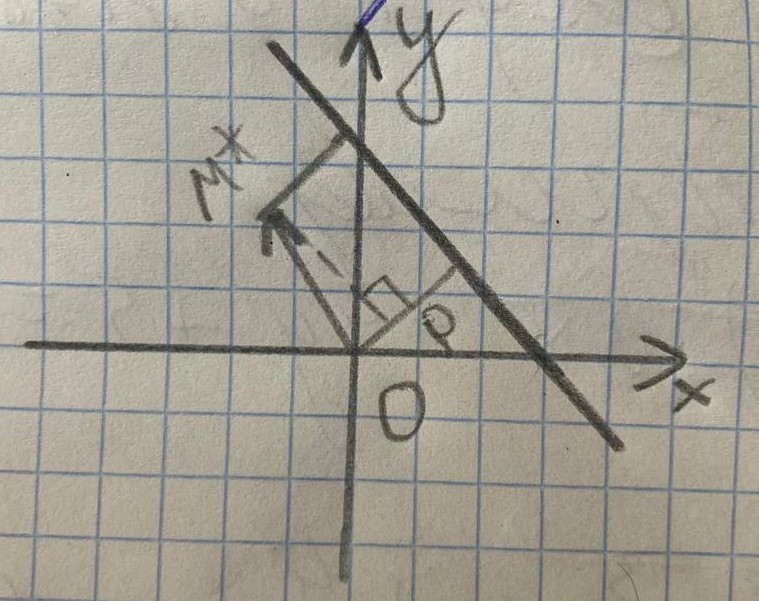
\(pr_{\vec{n}}(\vec{OM}) = p - d\)
Обозначение отклонения прямой от точки
\(x^{\star} \cos{\phi} + y^{\star} \sin{\phi} - p = \delta\). Где \(\delta = \pm d\).
\(\delta\) - отклонение точки от прямой
Задача
Даны две пересекающиеся прямые \(\ell_{1}, \ell_{2}\). Получить уравнение биссектрис углов между \(\ell_{1}, \ell_{2}\).
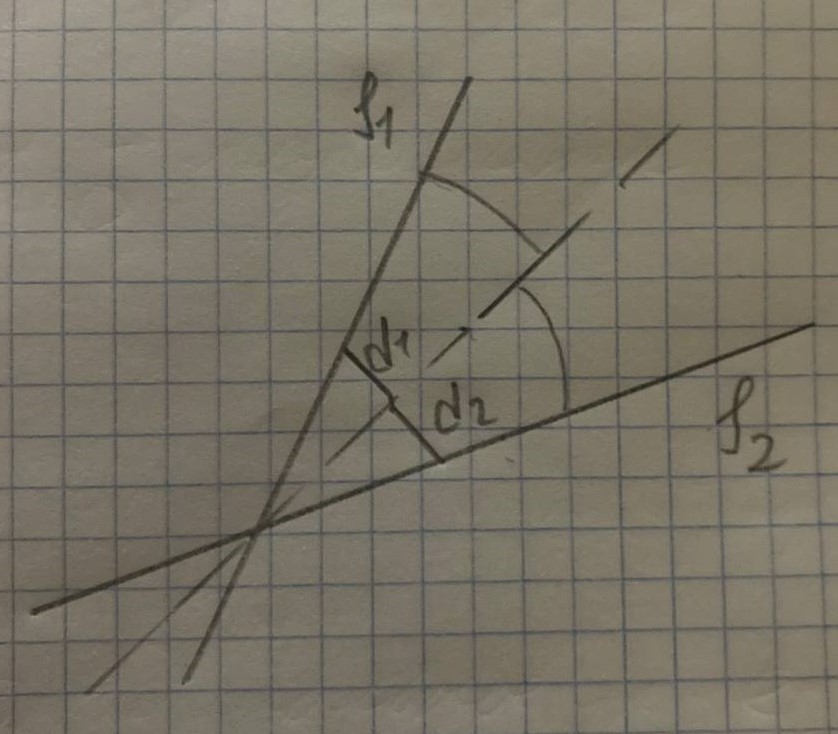
\(d_{1} = x \cos{\phi_{1}} + y \sin{\phi_{1}} - p_{1}\)
\(d_{2} = x \cos{\phi_{2}} + y \sin{\phi_{2}} - p_{2}\)
Расстояние до биссектрис \(x \cos{\phi_{1}} + y \sin{\phi_{1}} - p_{1} = \pm (x \cos{\phi_{2}} + y \sin{\phi_{2}} - p_{2})\)
Лекция 07.10.2022#
Определение пучка прямых#
Множество всех прямых, проходящих через данную точку называют пучком.
Эта точка либо задается непосредственно, либо как пересечение двух прямых пучка. Пусть это будут прямые: \( \begin{equation*} \begin{cases} A_{1}x + B_{1}y + C_{1} = 0 \\ A_{2}x + B_{2}y + C_{2} = 0 \end{cases} \end{equation*} \implies\) Пересечение, если \(\begin{equation*} \begin{vmatrix} A_{1} & B_{1} \\ A_{2} & B_{2} \end{vmatrix} \end{equation*} \neq 0\)
Уравнение пучка
\(\alpha(A_{1}x + B_{1}y + C_{1}) + \beta(A_{2}x + B_{2}y + C_{2}) = 0\) (\(\alpha , \beta\) - некоторые числа, \(\alpha \neq 0, \beta \neq 0\) )
Пример
Даны две пересекающиеся прямые, найти прямую, входящую в пучок первых двух и параллельную заданной прямой вне пучка.
Данная прямая \(\ell_{0} : A_{0}x + B_{0}y + C_{0}\)
\(\ell_{1} : A_{1}x + B_{1}y + C_{1}\)
\(\ell_{2} : A_{2}x + B_{2}y + C_{2}\)
Искомая прямая \(\ell_{3} : A_{3}x + B_{3}y + C_{3}\)
Тогда \(\alpha(A_{1}x + B_{1}y + C_{1}) + \beta(A_{2}x + B_{2}y + C_{2}) = 0\), найти \(\alpha\) и \(\beta\) такие, что полученная прямая параллельна \(\ell_{0}\).
Искомая прямая \(\ell_{3}\) содержится в пучке. Пучок : \((\alpha A_{1} + \beta A_{2})x + (\alpha B_{1} + \beta B_{2})y + (\alpha C_{1} + \beta C_{2}) = 0 \). По условию задачи : \(\dfrac{A_{3}}{A_{0}} = \dfrac{B_{3}}{B_{2}} \neq \dfrac{C_{3}}{C_{0}} \implies \dfrac{\alpha A_{1} + \beta B_{2}}{A_{0}} = \dfrac{\alpha B_{1} + \beta B_{2}}{B_{0}} \implies (\alpha A_{1} + \beta B_{2})B_{0} = (\alpha B_{1} + \beta B_{2})A_{0} \implies \alpha(A_{1}B_{0} - B_{1}A_{0}) = \beta(B_{2}A_{0} - A_{2}B_{0})\)
Пусть \(\alpha \neq 0\), тогда \(\beta = \dfrac{A_{1}B_{0} - B_{1}A_{0}}{B_{2}A_{0} - A_{2}B_{0}}\)
Прямая и плоскость в пространстве#
Уравнение плоскости#
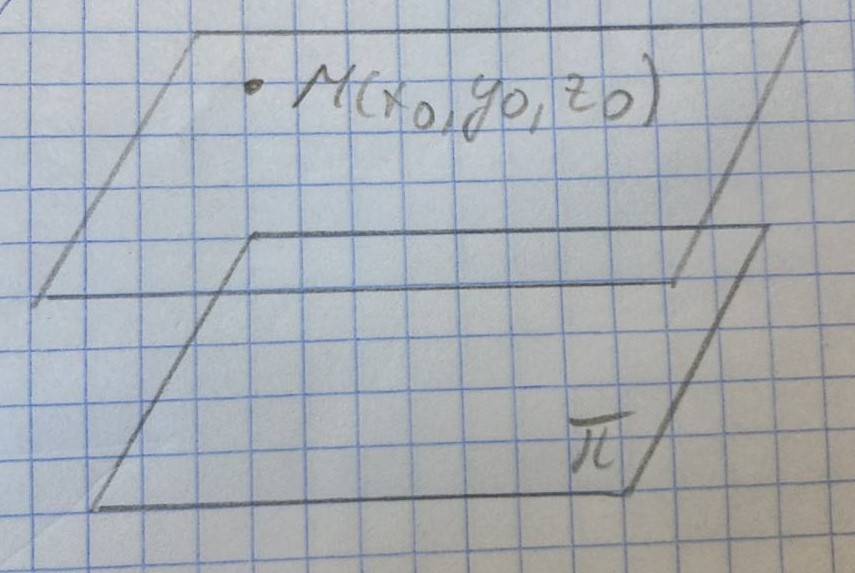
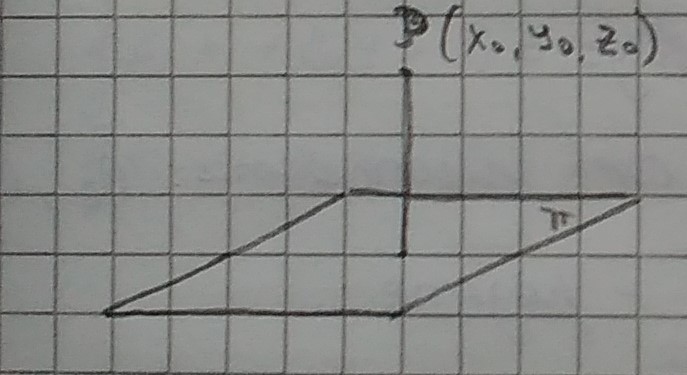
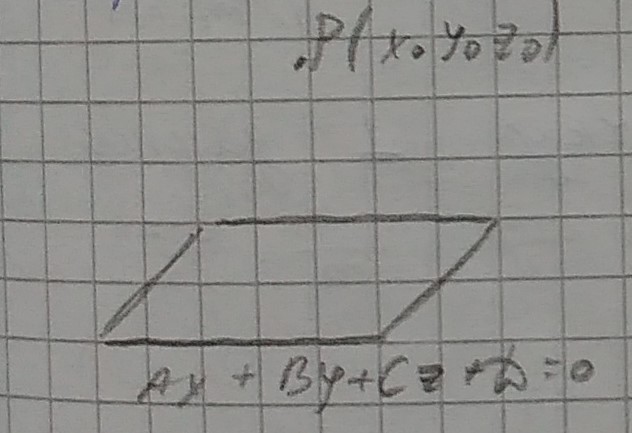
Составить уравнение плоскости через данную точку \(M_{0}(x_{0}, y_{0}, z_{0})\), перпендикулярной данному вектору \(\vec{N}(A, B, C)\)
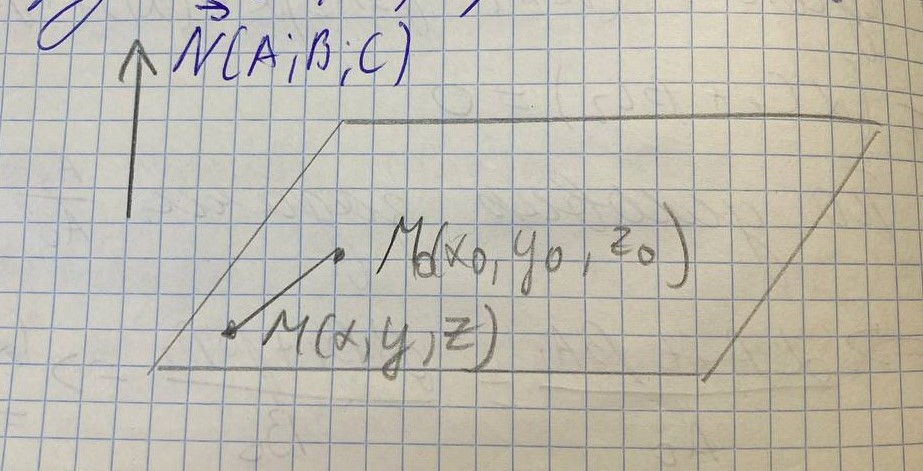
Необходимое и достаточное условие принадлежности \(M(x, y, z)\) искомой плоскости: \((\vec{N}, \vec{M_{0}M}) = 0\), получим уравнение : \(A(x - x_{0}) + B(y - y_{0}) + C(z - z_{0}) = 0\).
\(Ax + By + Cz + D = 0\) (Общее уравнение плоскости, где \(D = -Ax_{0} - By_{0} - Cz_{0}\))
Неполные уравнения плоскости#
\(D = 0 : Ax + By + Cz = 0\) (Плоскость, проходящая через начало координат)
\(A = 0: By + Cz + D= 0\) (Плоскость, параллельная \(Ox\))
\(B = 0: Ax + Cz + D= 0\) (Плоскость, параллельная \(Oy\))
\(C = 0: Ax + By + D= 0\) (Плоскость, параллельная \(Oz\))
\(A = B = 0 : Cz + D = 0, z = - \dfrac{D}{C}, z = const\) (Плоскость, параллельная \(Oxy\), \(z = 0\) - уравнение \(Oxy\))
Уравнение плоскости в отрезках на координатных осях#
\(Ax + By + Cz + D = 0 | \cdot (- \dfrac{1}{D})\)
\(\dfrac{Ax}{-D} + \dfrac{By}{-D} + \dfrac{Cz}{-D} = 1\). Обозначим \(\dfrac{A}{-D} = a, \dfrac{B}{-D} = b, \dfrac{C}{-D} = c\)
\(\dfrac{x}{a} + \dfrac{y}{b} + \dfrac{z}{c} = 1\)
Угол между плоскостями. Условие параллельности и перпендикулярности двух плоскостей#
Определение
Угол между плоскостями есть угол между их нормалями.
\(\cos\phi = \dfrac{(\vec{N_{1}}, \vec{N_{2}})}{|\vec{N_{1}}||\vec{N_{2}}|}\)
Условие параллельности двух плоскостей
\(\dfrac{A_{1}}{A_{2}} = \dfrac{B_{1}}{B_{2}} = \dfrac{C_{1}}{C_{2}}\)
Условие перпендикулярности двух плоскостей
\((\vec{N_{1}}, \vec{N_{2}}) = 0\)
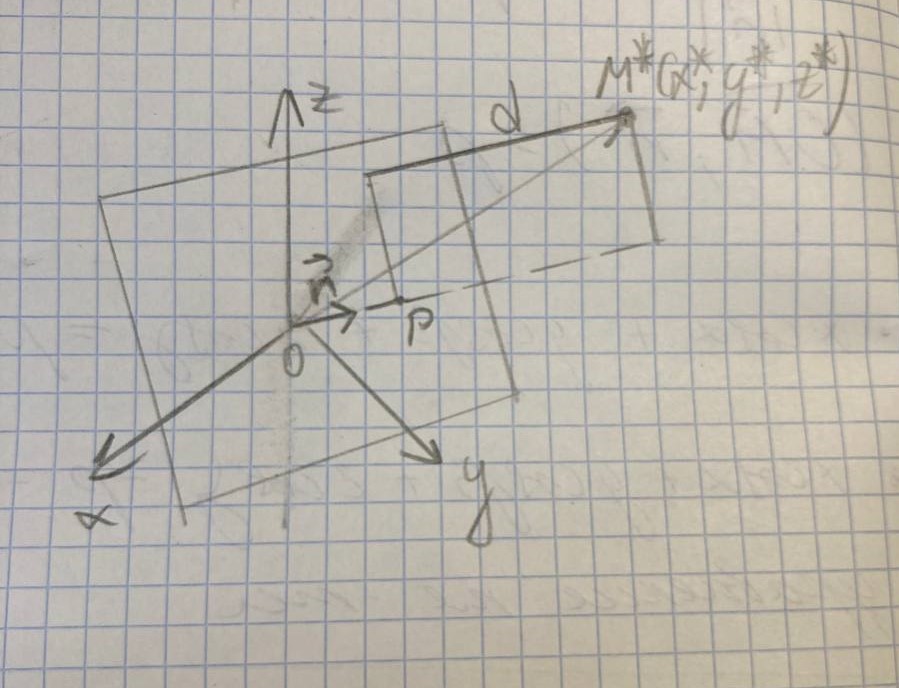
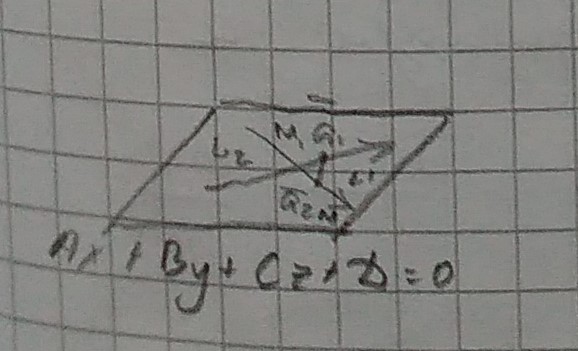
Нормальное уравнение плоскости#
Плоскость задается \(p, \alpha, \beta, \gamma\), где \(p\) - расстояние от начала координат до плоскости и \(\alpha, \beta, \gamma\) - углы \(\vec{n}\) с осями координат.
Необходимое и достаточное условие принадлежности \(M(x, y, z)\) искомой плоскости: \(pr_{\vec{n}}{\vec{OM}} = p\)
\(\dfrac{(\vec{OM}, \vec{n})}{|\vec{n}|} = p \implies (\vec{OM}, \vec{n}) = p \ (|\vec{n}| = 1)\)
\(x\cos{\alpha} + y\cos{\beta} + z\cos{\gamma} = p\)
\(x\cos{\alpha} + y\cos{\beta} + z\cos{\gamma} - p = 0\) - Нормальное уравнение плоскости
Перевод из общего уравнение плоскости в нормальное#
\(Ax + By + Cz + D = 0 \ |\cdot (\dfrac{1}{\sqrt{A^{2} + B^{2} + C^{2}}}) \) (Если свободный член \(> 0, \) то \(| \cdot (- \dfrac{1}{\sqrt{A^{2} + B^{2} + C^{2}}})\)
\(\underbrace{\dfrac{A}{\sqrt{A^{2} + B^{2} + C^{2}}}}_{\cos{\alpha}}x + \underbrace{\dfrac{B}{\sqrt{A^{2} + B^{2} + C^{2}}}}_{\cos{\beta}}y + \underbrace{\dfrac{C}{\sqrt{A^{2} + B^{2} + C^{2}}}}_{\cos{\beta}}z - \dfrac{D}{\sqrt{A^{2} + B^{2} + C^{2}}} = 0\)
Расстояние от точки до плоскости#
\(d\) - расстояние от \(M^{\star}\) до плоскости
\(pr_{\vec{n}}(\vec{OM^{\star}}) = p + d\)
\(x^{\star}\cos{\alpha} + y^{\star}\cos{\beta} + z^{\star}\cos{\gamma} = p + d\)
\(x^{\star}\cos{\alpha} + y^{\star}\cos{\beta} + z^{\star}\cos{\gamma} - p = d\)
Замечание
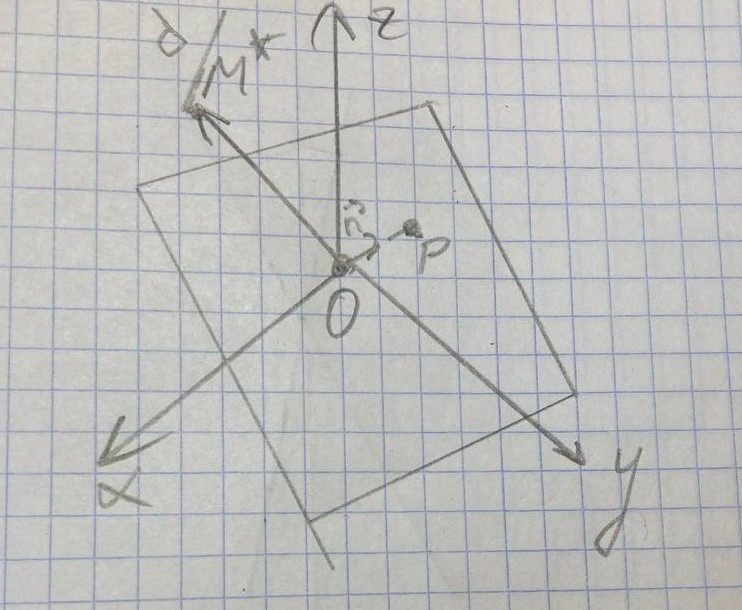
Если \(\vec{OM^{\star}}\) по одну сторону от плоскости, то получим \(x^{\star}\cos{\alpha} + y^{\star}\cos{\beta} + z^{\star}\cos{\gamma} - p = - d\)
Отклонения \(\delta\) точки от плоскости, \(\delta = \pm d\). Причем, если \(M^{\star}\) и \(O\) лежат по разные стороны от плоскости, \(\delta = d\). \(\delta = - d\) иначе.
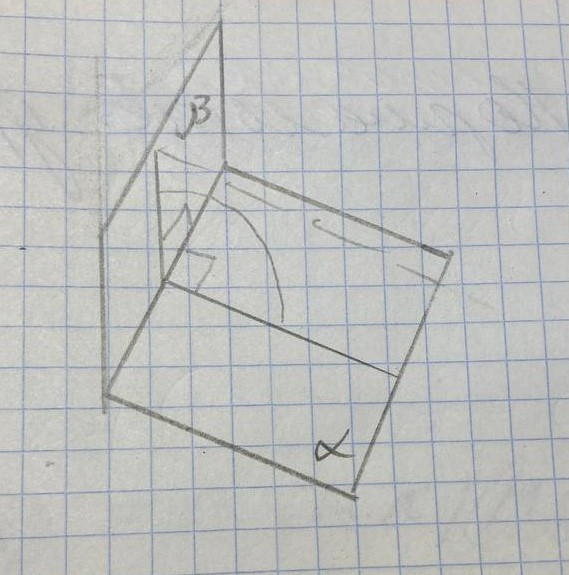
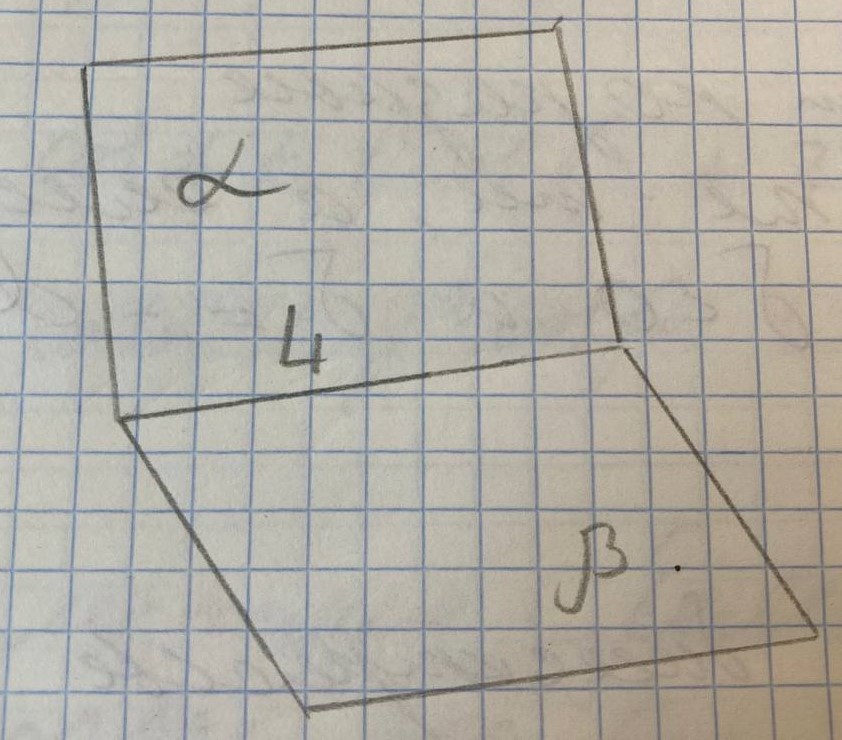
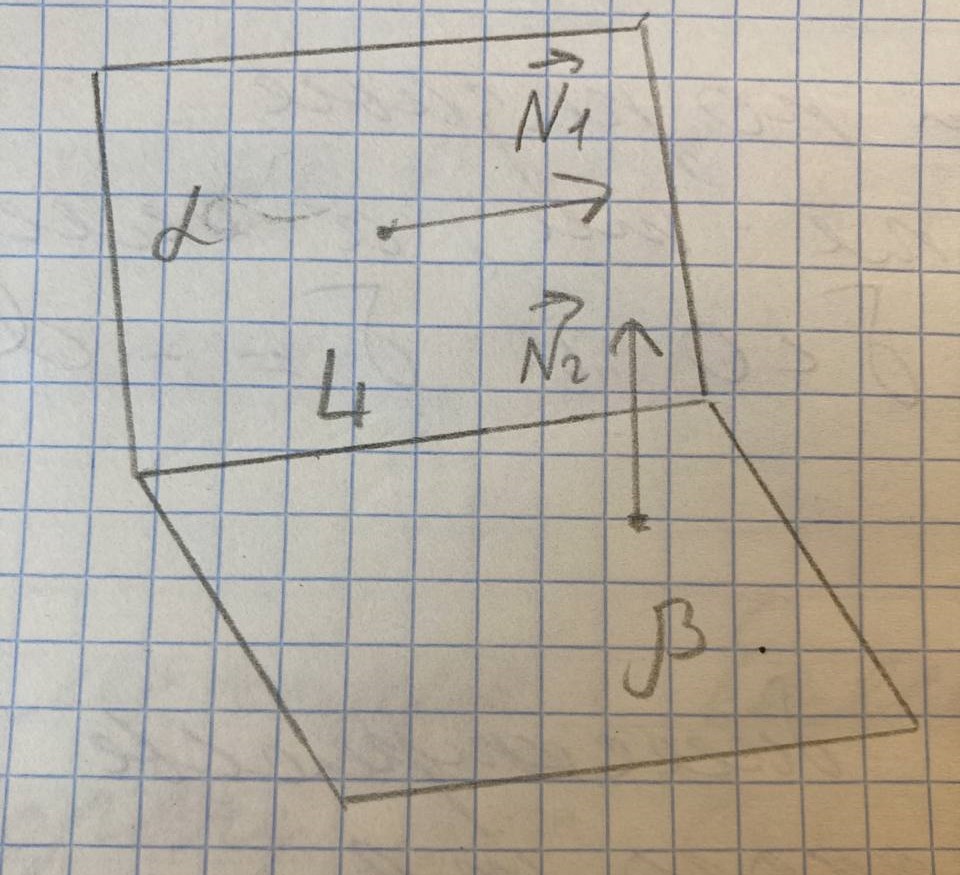
Уравнение биссектрисы плоскости двугранного угла#
\(x\cos{\alpha_{1}} + y\cos{\beta_{1}} + z\cos{\gamma_{1}} - p_{1} = x\cos{\alpha_{2}} + y\cos{\beta_{2}} + z\cos{\gamma_{2}} - p_{2}\)
Лекция 21.10.2022#
Пучек плоскостей#
Определение
Пучек плоскостей - множество всех плоскостей, проходящих через данную прямую.
Пучек задается прямой, которая задается любой парой плоскостей.
Общая формула пучка плоскостей
\(\alpha(A_{1}x + B_{1}y + C_{1}z + D_{1}) + \beta(A_{2}x + B_{2}y + C_{2}z + D_{2}) = 0\). Где \(\alpha, \ \beta\) - любые числа.
Прямая в пространстве#
Прямая в пространстве может быть задана как система из двух уравнений плоскостей, пересечением которых она является.
\(\ell : \begin{equation*} \begin{cases} A_{1}x + B_{1}y + C_{1}z + D_{1} = 0 \\ A_{2}x + B_{2}y + C_{2}z + D_{2} = 0 \end{cases} \end{equation*}\)
Каноническое уравнение прямой в пространстве#
Рассмотрим задачу: через данную точку провести прямую, параллельную данному вектору.
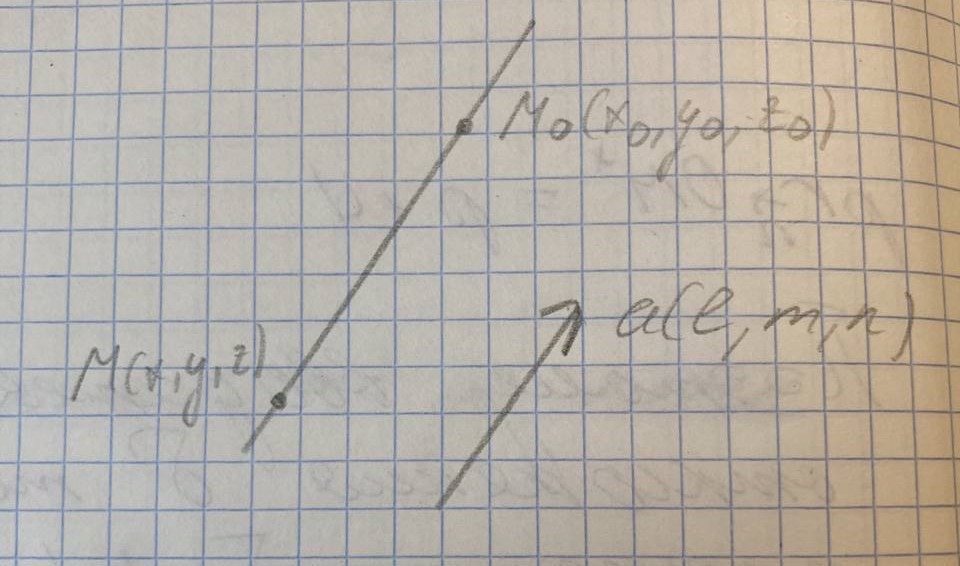
Необходимое и достаточное условие принадлежности искомой прямой является коллинеарность векторов \(\vec{M_{0}M}\) и \(a\). Это означает пропорциональность их соответствующих координат.
\(\dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = \dfrac{z - z_{0}}{n}\)
Переход от общих уравнений прямой к каноническому в пространстве#
\(\vec{a} = \left[\vec{N_{1}}, \vec{N_{2}}\right]\)
\(\vec{N_{1}} = \left(A_{1}, B_{1}, C_{1} \right)\)
\(\vec{N_{2}} = \left(A_{2}, B_{2}, C_{2} \right)\)
Пример
\(\ell : \begin{equation*} \begin{cases} x + y - z + 1 = 0 \\ 2x - y + 3z - 2 = 0 \end{cases} \end{equation*}\)
\(\vec{N_{1}} = \left(1, 1, -1 \right)\)
\(\vec{N_{2}} = \left(2, -1, 3 \right)\)
\(\vec{a} = \left[\vec{N_{1}}, \vec{N_{2}}\right] = \begin{equation*} \begin{vmatrix} i & j & k \\ 1 & 1 & -1 \\ 2 & -1 & 3 \end{vmatrix} \end{equation*} = \left(2, -5, -3 \right)\)
\(z = 0 \implies \begin{equation*} \begin{cases} x + y = -1 \\ 2x - y = 2 \end{cases} \end{equation*} \implies x = \dfrac{1}{3}; y = - \dfrac{4}{3}\)
Искомое уравнение : \(\dfrac{x - \dfrac{1}{3}}{2} = \dfrac{y + \dfrac{4}{3}}{-5} = \dfrac{z}{-3}\)
Угол между прямыми, условие параллельности и перпендикулярности прямых в пространстве.#
Даны две прямые :
\(\ell_{1} : \dfrac{x - x_{1}}{l_{1}} = \dfrac{y - y_{1}}{m_{1}} = \dfrac{z - z_{1}}{n_{1}}\)
\(\ell_{2} : \dfrac{x - x_{2}}{l_{2}} = \dfrac{y - y_{2}}{m_{2}} = \dfrac{z - z_{2}}{n_{2}}\)
Определение угла между прямыми в пространстве
Углом между прямыми называют угол между их направляющими векторами \(\vec{a_{1}}, \vec{a_{2}}\)
\(\cos{\phi} = \dfrac{\left(\vec{a_{1}}, \vec{a_{2}} \right)}{|\vec{a_{1}}||\vec{a_{2}}|} \)
Условие перпендикулярности прямых в пространстве
\(\left(\vec{a_{1}}, \vec{a_{2}} \right) = 0\)
Условие параллельности прямых в пространстве
Параллельность направляющих векторов.
Построение прямой по двум точкам в пространстве#
Дано: \(M_{1}(x_{1}, y_{1}, z_{1})\) , \(M_{2}(x_{2}, y_{2}, z_{2})\)
\(\vec{a} = (x_{2} - x_{1}, y_{2} - y_{1}, z_{2} - z_{1})\)
В качестве точки на прямой можно взять любую, например \(M_{1}\)
\(\ell : \dfrac{x - x_{1}}{x_{2} - x_{1}} = \dfrac{y - y_{1}}{y_{2} - y_{1}} = \dfrac{z - z_{1}}{z_{2} - z_{1}}\)
Угол между прямой и плоскостью в пространстве#
Угол между \(\vec{a}\) и нормалью отличается от угла между плоскостью и вектором \(\vec{a}\) дополнением до \(\dfrac{\pi}{2}\).
Обозначим угол между \(\vec{a}\) и плоскостью через \(\phi\). Тогда угол между \(\vec{N}\) и \(\vec{a}\) будет \(\dfrac{\pi}{2} - \phi\)
\(\cos{\left(\dfrac{\pi}{2} - \phi\right)} = \dfrac{\left(\vec{N}, \vec{a}\right)}{|\vec{N}||\vec{a}|} = \sin{\phi}\).
Условие параллельности и перпендикулярности прямой и плоскости в пространстве#
Условие параллельности прямой и плоскости в пространстве
\(\vec{N} \parallel \vec{a} \implies \left(\vec{N}, \vec{a} \right) = 0\)
Условие перпендикулярности прямой и плоскости в пространстве
\(\vec{N} \perp \vec{a} \implies \dfrac{A}{l} = \dfrac{B}{m} = \dfrac{C}{n}\)
Условие принадлежности данной прямой данной плоскости#
\(\ell : \dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = \dfrac{z - z_{0}}{n}\)
\(\alpha : Ax + By + Cz + D = 0\)
Условие принадлежности
\(\left(\vec{N}, \vec{a}\right) = 0\) и \(Al + Bm + Cn = 0\).
Какая - то точка прямой должна принадлежать плоскости, например \((x_{0}, y_{0}, z_{0}) \implies Ax_{0} + By_{0} + Cz_{0} + D = 0\)
Параметрические уравнения прямой#
Пусть даны канонические уравнения прямой: \(\dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = \dfrac{z - z_{0}}{n} = t\)
Имеем три уравнения с четырьмя переменными: \( \begin{equation*} \begin{cases} x - x_{0} = lt \\ y - y_{0} = mt \\ z - z_{0} = nt \end{cases} \end{equation*}\) \( \implies \begin{equation*} \begin{cases} x = x_{0} + lt \\ y = y_{0} + mt \\ z = z_{0} + nt \end{cases} \end{equation*}\)
С помощью этих параметрических уравнений легко находить точку пересечения прямой и плоскости:
\(\ell : \dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = \dfrac{z - z_{0}}{n} = t\)
\(\pi : Ax + By + Cz + D = 0\)
Чтобы найти \(\rho\) используем параметрические уравнения \(\ell\) и подставим \(x, y, z\) из этих уравнений в уравнение плоскости.
\(A(x_{0} + lt) + B(y_{0} + mt) + C(z_{0} + nt) + D = 0\). Получим одно уравнение с \(t\).
Находим \(t\) и подставляем в параметрические уравнения. Это и будут координаты точек пересечения \(\rho\).
Примеры
Опустить \(\perp\) из данной точки на данную плоскость.
Запишем канонические уравнения искомого перпендикуляра \(\dfrac{x - x_{0}}{A} = \dfrac{y - y_{0}}{B} = \dfrac{z - z_{0}}{C}\)
Провести через данную точку плоскость, параллельную данной плоскости.
Дано : \(\pi : Ax + By + Cz + D = 0\), \(M_{0}(x_{0}, y_{0}, z_{0})\)
Нормаль искомой плоскости совпадает с нормалью данной плоскости \(\vec{N} = (A, B ,C)\).
Получим : \(A(x - x_{0}) + B(y - y_{0}) + C(z - z_{0}) = 0\)
Условие принадлежности двух прямых плоскости в пространстве#
\(\ell_{1} : \dfrac{x - x_{1}}{l_{1}} = \dfrac{y - y_{1}}{m_{1}} = \dfrac{z - z_{1}}{n_{1}}\)
\(\ell_{2} : \dfrac{x - x_{2}}{l_{2}} = \dfrac{y - y_{2}}{m_{2}} = \dfrac{z - z_{2}}{n_{2}}\)
Воспользуемся условием компланарности трех векторов \((\vec{a_{1}}, \vec{a_{2}}, \vec{M_{1}M_{2}}) : \begin{vmatrix} x_{2} - x_{1} & y_{2} - y_{1} & z_{2} - z_{1} \\ l_{1} & m_{1} &n_{1} \\ l_{2} & m_{2} &n_{2} \end{vmatrix} = 0\)
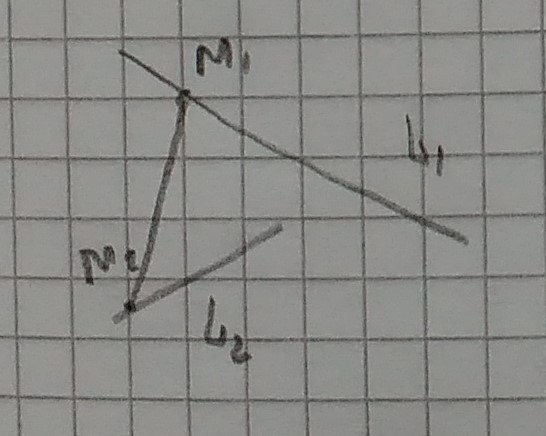
Скрещивающиеся прямые в пространстве#
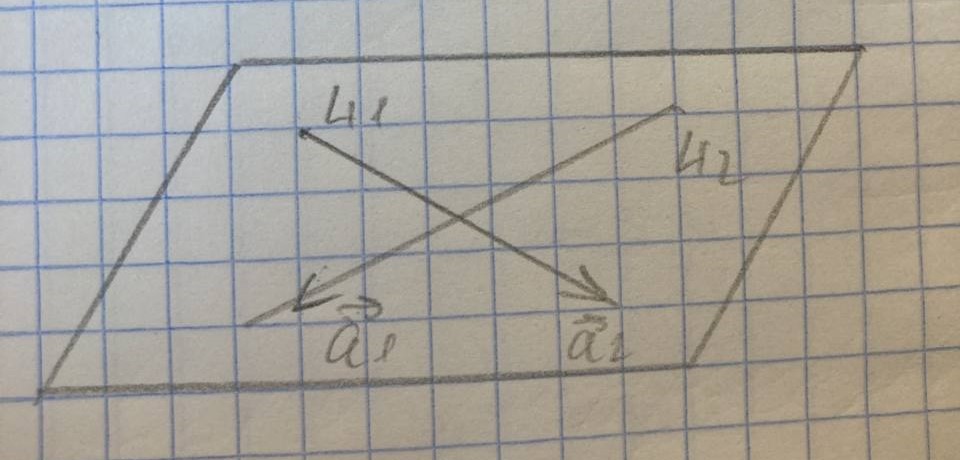
Скрещивающиеся прямые лежат в параллельных плоскостях.
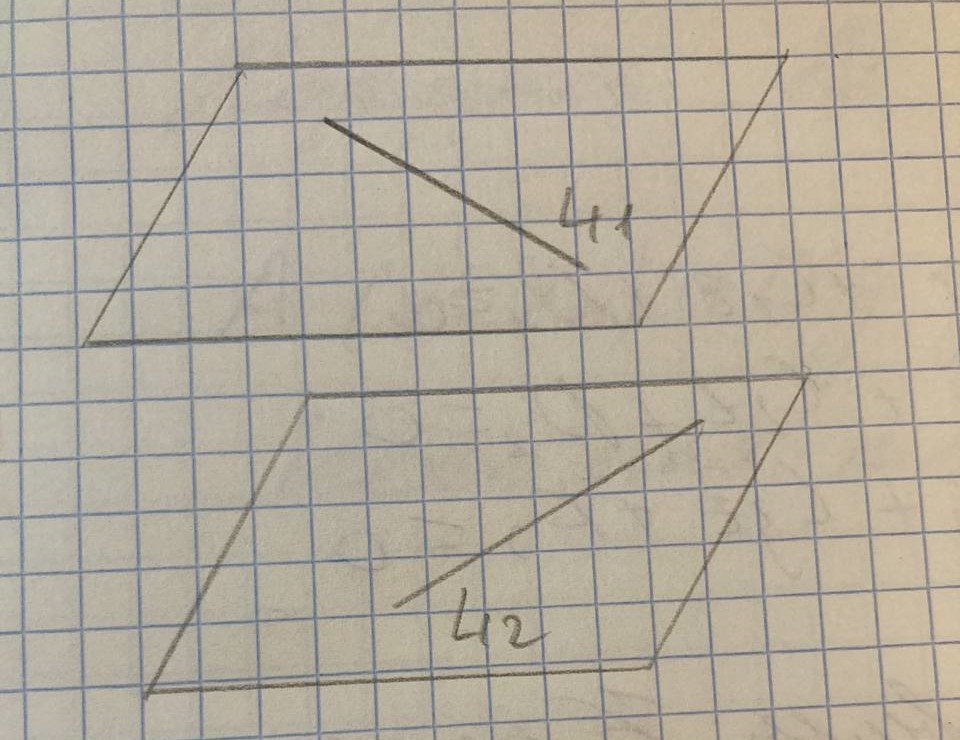
Пример
Написать уравнение плоскости, проходящей через одну из скрещивающихся прямых, параллельно другой из них.
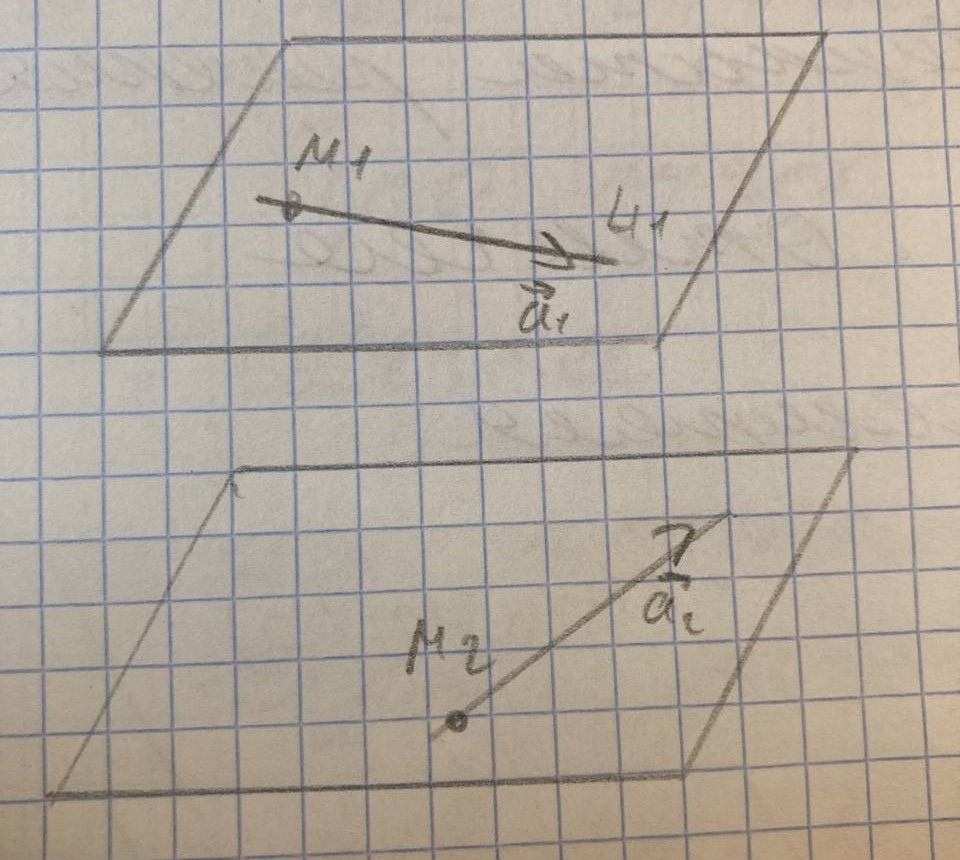
\(\ell_{1} : \dfrac{x - x_{1}}{l_{1}} = \dfrac{y - y_{1}}{m_{1}} = \dfrac{z - z_{1}}{n_{1}}\)
\(\ell_{2} : \dfrac{x - x_{2}}{l_{2}} = \dfrac{y - y_{2}}{m_{2}} = \dfrac{z - z_{2}}{n_{2}}\)
Для уравнения нужна нормаль \(\vec{N} = [\vec{a_{1}}, \vec{a_{2}}] = (A, B, C) \) и точка \(M(x_{1}, y_{1}, z_{1})\).
Искомая плоскость : \(A(x - x_{1}) + B(y - y_{1}) + C(z - z_{1}) = 0\)
Пучек и связка плоскостей#
Определение связки плоскостей
Связка плоскостей - совокупность всех плоскостей, проходящих через данную точку.
Дана точка \(M_{0}(x_{0},y_{0}, z_{0})\). Уравнение связки плоскостей : \(A(x - x_{0}) + B(y - y_{0}) + C(z - z_{0}) = 0\). Где \(A, B, C\) - произвольные числа, не равные нулю одновременно.
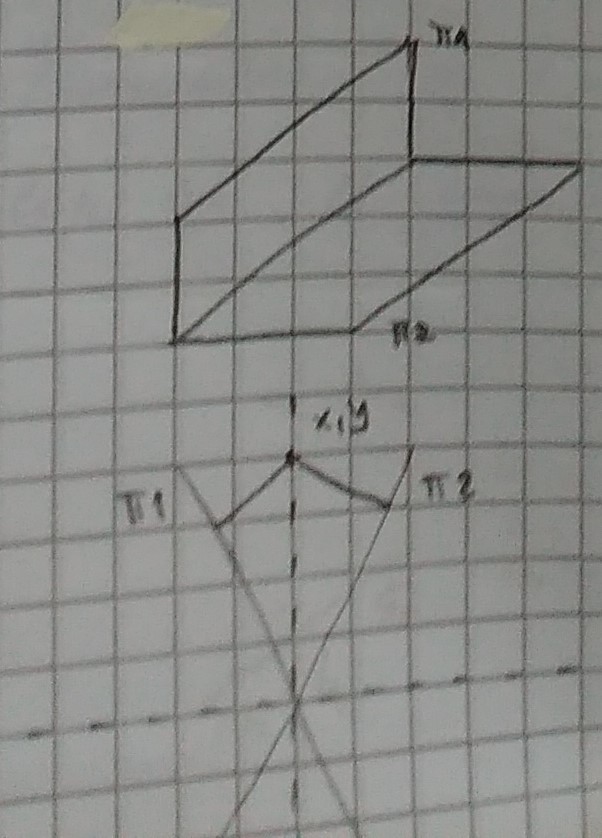
Условие прохождения трех различных плоскостей через одну и только одну точку.#
Дано: \( \begin{equation*} \begin{cases} A_{1}x + B_{1}y + C_{1}z + D_{1} = 0 \\ A_{2}x + B_{2}y + C_{2}z + D_{2} = 0 \\ A_{3}x + B_{3}y + C_{3}z + D_{3} = 0 \end{cases} \end{equation*}\)
По правилу Крамера условие единственности решения системы : \(\begin{equation*} \begin{vmatrix} A_{1} & B_{1} & C_{1} \\ A_{2} & B_{2} & C_{2} \\ A_{3} & B_{3} & C_{3} \end{vmatrix} \end{equation*} = 0\)
Лекция 18.11.2022#
Прямая в пространстве#
\( \begin{equation*} \begin{cases} A_{1}x + B_{1}y + C_{1}z + D_{1} = 0 \\ A_{2}x + B_{2}y + C_{2}z + D_{2} = 0 \\ \end{cases} \end{equation*}\) - Общее уравнение прямой, можно описать эту же прямую любой другой парой плоскостей пучка.
Общий вид плоскостей пучка: \(\alpha(A_{1}x + B_{1}y + C_{1}z + D_{1}) + \beta(A_{2}x + B_{2}y + C_{2}z + D_{2}) = 0\)
Некоторые задачи на прямую и плоскость#
Условие пересечения трех различных плоскостей в одной и только одной точке
\( \begin{equation*} \begin{cases} A_{1}x + B_{1}y + C_{1}z + D_{1} = 0 \\ A_{2}x + B_{2}y + C_{2}z + D_{2} = 0 \\ A_{2}x + B_{2}y + C_{2}z + D_{3} = 0 \end{cases} \end{equation*}\)
По правилу Крамера система имеет единственное решение когда определитель системы отличен от нуля
\(\Delta = \begin{equation*} \begin{vmatrix} A_{1} & B_{1} & C_{1} \\ A_{2} & B_{2} & C_{2} \\ A_{3} & B_{3} & C_{3} \end{vmatrix} \end{equation*} \neq 0\)
Даны две плоскости. Написать уравнения биссекторных плоскостей.
Приведем каждое из уравнений плоскостей к нормальному виду
\(x\cos{\alpha} + y\cos{\beta} + z\cos{\gamma} - p = 0\)
\(\alpha, \beta, \gamma\) - углы нормального вектора плоскости с осями координат.
\(p\) - расстояние от начала координат до плоскости
Переход от общего уравнения плоскости к нормальному:
\(Ax + By + Cz + D = 0 \bigg| \cdot \left(\pm \dfrac{1}{\sqrt{A^{2} + B^{2} + C^{2}}}\right)\)
\(\dfrac{A}{\sqrt{A^{2} + B^{2} + C^{2}}}x + \dfrac{B}{\sqrt{A^{2} + B^{2} + C^{2}}}y + \dfrac{C}{\sqrt{A^{2} + B^{2} + C^{2}}}z - \dfrac{|D|}{\sqrt{A^{2} + B^{2} + C^{2}}} = 0\)
Уравнение биссекторных плоскостей:
\(x\cos{\alpha_{1}} + y\cos{\beta_{1}} + z\cos{\gamma_{1}} - p_{1} = \pm \left(x\cos{\alpha_{2}} + y\cos{\beta_{2}} + z\cos{\gamma_{2}} - p_{2}\right)\)
Условие пересечения данной плоскости отрезка \(AB\)
Запишем плоскость в нормальном виде
Найдем отклонения точки \(A\) и \(B\) от плоскости \(\delta_{A}, \delta_{B}\)
Условие пересечения: знаки \(\delta_{A}\) и \(\delta_{B}\) - разные
Даны две точки \(A\) и \(B\). Выяснить лежат ли эти точки:
В одном углу между двумя плоскостями
Вычислим отклонения этих точек от обеих плоскостей:
\(\delta_{A}^{1},\ \delta : \ \delta_{A}^{1}, \ \delta_{B}^{1}\) - один знак
\(\delta,\ \delta_{B}^{2} : \ \delta_{A}^{2}, \ \delta_{B}^{2}\) - один знак
В смежных углах
Знаки отклонения точек \(A\) и \(B\) от первой плоскости - разные, от второй - одинаковые
В вертикальных углах
Отклонения \(A\) и \(B\) от первой плоскости - разные, от второй - разные.
Опустить \(\perp\) из данной точки на данную плоскость
Уравнение плоскости : \(Ax + By + Cz + D = 0\)
\(A,\ B, \ C\) - координаты нормали вектора \(\vec{N}(A,B,C)\)
Известны координаты направлений вектора - перпендикуляра, каноническое уравнение:
\(\dfrac{x - x_{0}}{l} = \dfrac{y -y_{0}}{m} = \dfrac{z - z_{0}}{n}\)
\(\vec{a} = (l, m, n)\) - направляющий вектор
\(\dfrac{x - x_{0}}{A} = \dfrac{y - y_{0}}{B} = \dfrac{z - z_{0}}{C}\)
Через данную прямую провести плоскость \(\perp\) данной плоскости
\(L : \dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = \dfrac{z - z_{0}}{n}\)
Точка искомой плоскости: \(M_{0}\left(x_{0}, y_{0}, z_{0}\right)\)
Вектор нормали : \(\vec{N} = \left[\vec{N_{0}}, \vec{a}\right]\)
Векторы данной плоскости \(\vec{N_{0}} = \left(A,B,C\right)\)
\(A(x - x_{0}) + B(y - y_{0}) + C(z - z_{0}) = 0\)
Через данную прямую провести плоскость \(\parallel\) данной плоскости
Точка искомой плоскости известна: \(P(x_{0}, y_{0}, z_{0})\)
\(\vec{N}\) - нормальный вектор совпадает с нормальным вектором данной плоскости \(\vec{N} = (A, B, C)\)
\(A(x - x_{0}) + B(y - y_{0}) + C(z - z_{0}) = 0\)
Условие принадлежности двух прямых данной плоскости
\(L_{1} : \dfrac{x - x_{1}}{l_{1}} = \dfrac{y - y_{1}}{m_{1}} = \dfrac{z - z_{1}}{n_{1}}\)
\(L_{2} : \dfrac{x - x_{2}}{l_{2}} = \dfrac{y - y_{2}}{m_{2}} = \dfrac{z - z_{2}}{n_{1}}\)
Условие принадлежности двух прямых - компланарность векторов \(\vec{a_{1}}, \ \vec{a_{2}}\) и \(\vec{M_{1}}, \ \vec{M_{2}}\), то есть смешанное произведение равно \(0\):
\(\begin{equation*} \begin{vmatrix} x_{2} - x_{1} & y_{2} - y_{1} & z_{2} - z_{1} \\ l_{1} & m_{1} & n_{1} \\ l_{2} & m_{2} & n_{2} \end{vmatrix} \end{equation*} = 0\)
Даны две прямые \(L_{1}, \ L_{2}\). Провести через \(L_{1}\) плоскость \(\parallel\) \(L_{2}\)
\(L_{1} : \dfrac{x - x_{1}}{l_{1}} = \dfrac{y - y_{1}}{m_{1}} = \dfrac{z - z_{1}}{n_{1}}\)
\(L_{2} : \dfrac{x - x_{2}}{l_{2}} = \dfrac{y - y_{2}}{m_{2}} = \dfrac{z - z_{2}}{n_{2}}\)
Для наклонной плоскости нужны точка \(M_{0}\left(x_{1}, y_{1}, z_{1}\right)\) и вектор нормали \(\vec{N} = \left[\vec{a_{1}}, \vec{a_{2}}\right] = \begin{equation*} \begin{vmatrix} \vec{i} & \vec{j} & \vec{k} \\ l_{1} & m_{1} & n_{1} \\ l_{2} & m_{2} & n_{2} \end{vmatrix} \end{equation*}\)
Провести плоскость через данную точку \(\perp\) данной прямой
\(L_{1} : \dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = \dfrac{z - z_{0}}{n} \)
Искомое уравнение \(l\left(x - x^{\star}\right) + m\left(y - y^{\star}\right) + n\left(z - z^{\star}\right) = 0\)
Провести плоскость через данную прямую и не принадлежащую ей точку
\(L : \dfrac{x - x_{0}}{l} = \dfrac{y - y_{0}}{m} = \dfrac{z - z_{0}}{n} \)
Точка искомой плоскости: \(M^{\star}\). Нормальный вектор искомой плоскости: \(\vec{N} = \left[\vec{a}, \vec{M_{0}M^{\star}}\right]\)
Через данную точку провести \(\perp\) к заданной прямой
Можно свести к предыдущей задаче
Провести через \(M^{\star}\) плоскость \(\perp\) \(L\).
Найти \(m \times p\) и получить направляющий вектор искомого перпендикуляра: \(\vec{a} = \vec{pM}\)
Написать уравнение общего перпендикуляра двум скрещивающимся прямым
Направляющий вектор \(\vec{a} = \left[\vec{a_{1}}, \vec{a_{2}}\right]\). \(m\) - любая из \(L_{1}\) и \(L_{2}\)
Найти расстояние между скрещивающимися прямыми
Искомое расстояние \(d\) - проекция вектора \(\vec{M_{1}M_{2}}\) на общий \(\perp\)
\(pr_{b}(\vec{a}) = \dfrac{\left(\vec{a}, \vec{b}\right)}{|b|}\)
\(\vec{N}_{\perp} = \left[\vec{a_{1}},\vec{a_{2}} \right]\)
\(d = \dfrac{\left(\left[\vec{a_{1}}, \vec{a_{2}}\right], \vec{M_{1}M_{2}}\right)}{\left|\left[\vec{a_{1}}, \vec{a_{2}}\right]\right|}\)
Лекция 02.12.2022#
Кривые второго порядка#
Эллипс#
Эллипс - это геометрическое место точек, сумма расстояний которых до двух фиксированных точек есть величина \(2a\)

\(MF_{2} = \sqrt{(x + F_{x})^{2} + y^{2}}\)
\(MF_{1} = \sqrt{(x - F_{x})^{2} + y^{2}}\)
\(MF_{1} + MF_{2} = 2a\)
\(F_{x} = \left|F_{1_{x}}\right|\)
\(\sqrt{(x + F_{x})^{2} + y^{2}} + \sqrt{(x - F_{x})^{2} + y^{2}} = 2a\)
\(\sqrt{(x + F_{1_{x}})^{2} + y^{2}} = 2a - \sqrt{(x - F_{x})^{2} + y^{2}}\)
\((x + F_{x})^{2} + y^{2} = 4a^{2} - 4a\sqrt{(x - F_{x})^{2} + y^{2}} + (x - F_{x})^{2} + y^{2}\)
\(4a\sqrt{(x - F_{x})^{2} + y^{2}} = 4a^{2} - 4xF_{x}\)
\(a\sqrt{(x - c)^{2} + y^{2}} = a^{2} - xc\)
\(a^{2}\left[\left(x - F_{x}\right)^{2} + y^{2}\right] = a^{4} - 2a^{2}xF_{x} + x^{2}F_{x}^{2}\)
\(a^{2}\left(x^{2} - 2xF_{x} + F_{x}^{2} + y^{2}\right) = a^{4} - 2a^{2}xF_{x} + x^{2}F_{x}\)
\(a^{2}\left(x^{2} + F_{x}^{2} + y^{2}\right) = a^{4} + x^{2}F_{x}^{2}\)
\(a^{2}x^{2} - F_{x}^{2}x^{2} + a^{2}y^{2} = a^{4} - a^{2}F_{x}\)
\(\left(a^{2} - F_{x}^{2}\right)x^{2} + a^{2}y^{2} = a^{2}(a^{2} - F_{x}^{2})\)
\(a > 0 \implies a^{2} - F_{x}^{2} > 0 \implies a^{2} - F_{x}^{2} = b^{2}\)
\(b^{2}x^{2} + a^{2}y^{2} = a^{2}b^{2}\)
\(\dfrac{x^{2}}{a^{2}} + \dfrac{y^{2}}{b^{2}} = 1\)
Эксцентриситет эллипса
\(e = \dfrac{c}{a}\)
Директриса эллипса
\(x = \pm \dfrac{a}{e}\)
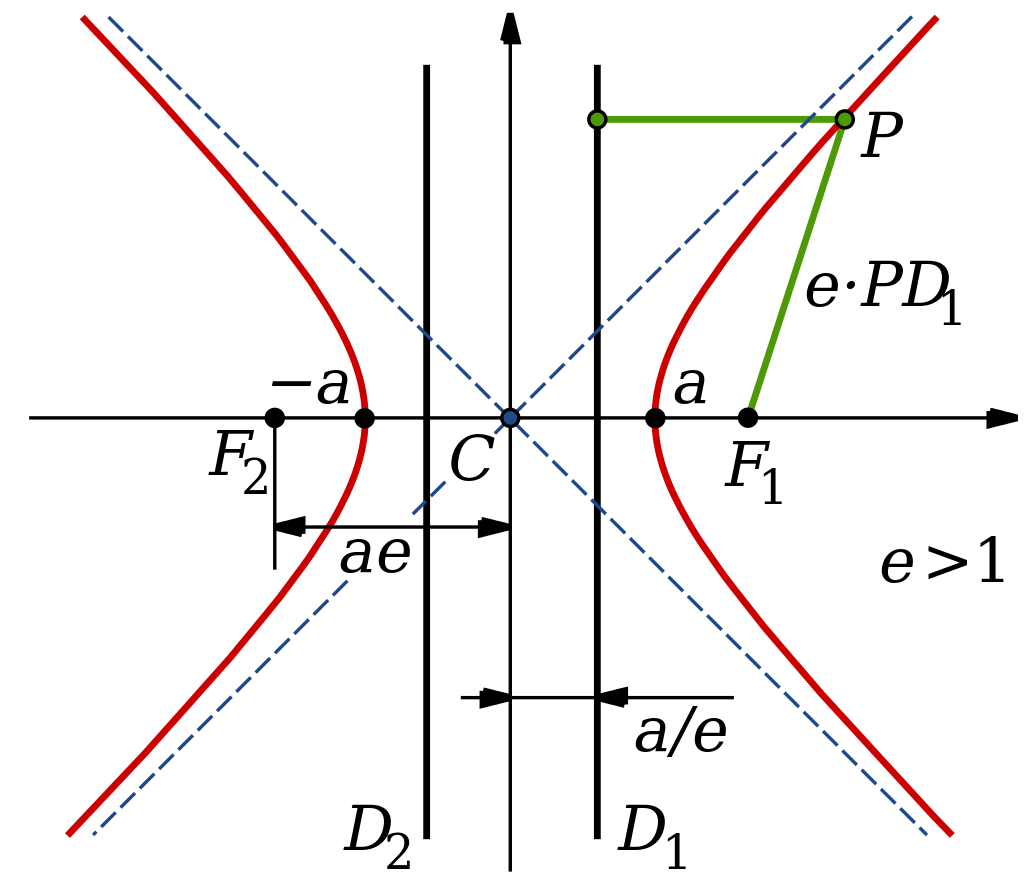
Гипербола#
Гипербола - это геометрическое место точек, модуль разности расстояний которых до двух фиксированных точек есть величина постоянная
\(MF_{2} = \sqrt{(x + F_{x})^{2} + y^{2}}\)
\(MF_{1} = \sqrt{(x - F_{x})^{2} + y^{2}}\)
\(|MF_{1} - MF_{2}| = 2a\)
\(F_{x} = \left|F_{1_{x}}\right|\)
\(|\sqrt{(x - F_{x})^{2} + y^{2}} - \sqrt{(x + F_{x})^{2} + y^{2}}| = 2a\)
\((x - F_{x})^{2} + y^{2} - 2\sqrt{(x - F_{x})^{2} + y^{2}}\sqrt{(x + F_{x})^{2} + y^{2}} + (x + F_{x})^{2} + y^{2} = 4a^{2}\)
\(2x^{2} + F_{x}^{2} + 2y^{2} - 4a^{2} = 2\sqrt{(x - F_{x})^{2} + y^{2}}\sqrt{(x + F_{x})^{2} + y^{2}}\)
\(\dots\)
\(b^{2} = F_{x}^{2} - a^{2}\)
\(\dfrac{x^{2}}{a^{2}} - \dfrac{y^{2}}{b^{2}} = 1\)
Уравнение асимптоты гиперболы
\(\dfrac{y^{2}}{b^{2}} = \dfrac{x^{2}}{a^{2}} - 1\)
\(y^{2} = \dfrac{b^{2}}{a^{2}}x - b^{2}\)
\(y = \pm \sqrt{\dfrac{b^{2}}{a^{2}}x - b^{2}}\)
\(\lim{x}{\infty} \dfrac{y}{y_{a}} = 1\)
\(k = \ \lim{x}{\infty} \dfrac{\sqrt{\dfrac{b^{2}}{a^{2}}x - b^{2}}}{kx + b} = 1 \implies \dfrac{b}{a}\)
\(y = \pm \dfrac{b}{a}x\)
Парабола#
Парабола - это геометрическое место точек, расстояние которых до данной фиксированной точки равно расстоянию до данной фиксированной прямой.
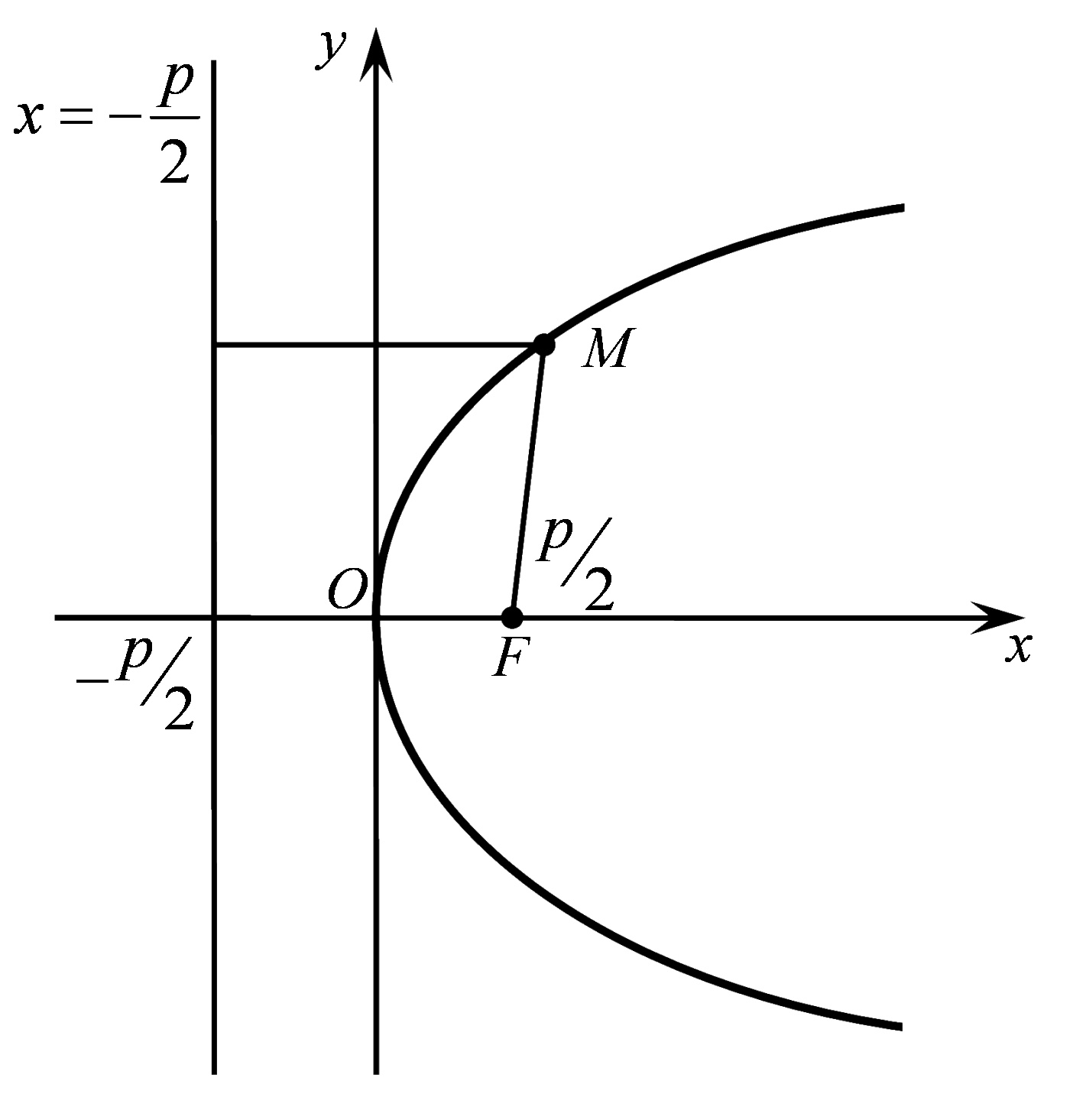
\(r = d\)
\(r = \sqrt{\left(x - \dfrac{p}{2}\right)^{2} + y^{2}}\)
\(d = \sqrt{\left(x + \dfrac{p}{2}\right)^{2}}\)
\(\sqrt{(x - \dfrac{p}{2})^{2} + y^{2}} = \sqrt{\left(x + \dfrac{p}{2}\right)^{2}}\)
\(\left(x - \dfrac{p}{2}\right)^{2} + y^{2} = \left(x + \dfrac{p}{2}\right)^{2}\)
\(-px + y^{2} = px\)
\(y^{2} = 2px\) - Каноническое уравнение параболы
Исследование общего уравнения второго порядка и упращение его с помощью преобразования системы координат#
Центральная кривая#
\(a_{11}x^{2} + a_{22}y^{2} + 2a_{12}xy + 2a_{13}x + 2a_{23}y + a_{33} = 0\)
Чтобы избавиться от линейных членов сделаем параллельный перенос осей координат
\( \begin{equation*} \begin{cases} x = x' + x_{0} \\ y = y' + y_{0} \end{cases} \end{equation*}\)
\(a_{11}(x' + x_{0})^{2} + a_{22}(y' + y_{0})^{2} + 2a_{12}(x' + x_{0})(y' + y_{0}) + 2a_{13}(x' +x_{0}) + 2a_{23}(y' + y_{0}) + a_{33} = 0\)
Приравняем коэффициенты при линейных членах к нулю
\( \begin{equation*} \begin{cases} x': 2a_{11}x_{0} + 2a_{12}y_{0} + 2a_{13} = 0 \\ y' :2a_{12}x_{0} + 2a_{22}y_{0} + 2a_{23} = 0 \end{cases} \sim \begin{cases} a_{11}x_{0} + a_{12}y_{0} + a_{13} = 0 \\ a_{12}x_{0} + a_{22}y_{0} + a_{23} = 0 \end{cases} \end{equation*}\)
По правилу Крамера система имеет и притом единственное решение, когда ее определитель отличен от нуля.
\(\delta = \begin{equation*} \begin{vmatrix} a_{11} & a_{12} \\ a_{12} & a_{22} \end{vmatrix} \end{equation*} \neq 0 \implies\) кривая имеет центр симметрии \((x_{0}, y_{0})\) и называется Центральной
\(a_{11}x^{2} + a_{22}y^{2} + 2a_{12}xy + 2a_{13}x + 2a_{23}y + a_{33}' = 0\)
\(a_{33}' = a_{11}x_{0}^{2} + a_{22}y_{0}^{2} + 2a_{12}x_{0}y_{0} + 2a_{13}x_{0} + 2a_{23}y_{0}\)
Сделаем поворот осей координат на некоторый угол: \( \begin{equation*} \begin{cases} x': \hat{x} \cos{\alpha} - \hat{y}\sin{\alpha} \\ y': \hat{y} \cos{\alpha} + \hat{x}\sin{\alpha} \end{cases} \end{equation*} \)
\(a_{11}(\hat{x}\cos{\alpha} - \hat{y}\cos{\alpha})^{2} + a_{22}(\hat{x}\sin{\alpha} + \hat{y}\cos{\alpha})^{2} + 2a_{12}(\hat{x}\cos{\alpha} - \hat{y}\cos{\alpha})(\hat{x}\sin{\alpha} + \hat{y}\cos{\alpha}) + a_{33}'\)
Найдем коэффициенты при \(\hat{x}\hat{y}\):
\(-2a_{11}\cos{\alpha}\sin{\alpha} + 2a_{22}\sin{\alpha}\cos{\alpha} + 2a_{12}\cos{\alpha}^{2} - 2a_{12}\sin{\alpha}^{2} = 0 \big| \cdot \dfrac{1}{\cos{\alpha}^{2}}\)
\(-a_{11}\tg{\alpha} + a_{22}\tan{\alpha} + a_{12} - a_{12}\tg{\alpha}^{2} = 0\)
\(-a_{12}\tg{\alpha}^{2} + (a_{22} - a_{11})\tg{\alpha} + a_{12} = 0\)
Решение существует, когда \(D \geq 0\).
\(D = (a_{22} - a_{11})^{2} + 4a_{12}^{2}\)
Нашли \(\alpha\) , после которого уравнение примет вид:
\(\hat{a_{11}} \hat{x}^{2} + \hat{a_{22}}\hat{y}^{2} + a_{33}'' = 0\)
\(\hat{a_{11}} \hat{x}^{2} + \hat{a_{22}}\hat{y}^{2} = - a_{33}'' \bigg| - \dfrac{1}{a_{33}'}\)
\(\dfrac{x^{2}}{-\dfrac{a_{33}'}{\hat{a_{11}}}} + \dfrac{y^{2}}{-\dfrac{a_{33}'}{\hat{a_{22}}}} = 1\)
\(- \dfrac{a_{33}'}{ \hat{a_{11}}} > 0\) и \(- \dfrac{a_{33}'}{\hat{a_{22}}} > 0 \implies \dfrac{\hat{x}^{2}}{a^{2}} + \dfrac{\hat{y}^{2}}{b^{2}} = 1\)
Если оба отношения отрицательны, то решения нет. Эта кривая называется мнимым эллипсом.
Если отношения разных знаков, то кривая - гипербола.
Если \(a'_{33} = 0\) и \(\hat{a_{11}}, \hat{\ a_{22}}\) - одинакового знака, то кривая - вырожденный эллипс. Если \(\hat{a_{11}}, \hat{\ a_{22}}\) разных знаков, то имеем две пересекающиеся прямые
Нецентральная кривая#
Можем показать, что \(\delta\) - инвариант
\(\delta = \begin{equation*} \begin{vmatrix} a_{11} & a_{12} \\ a_{12} & a_{22} \end{vmatrix} \end{equation*} = a_{11}a_{22} - a_{12}^{2} = 0\)
Параллельного переноса нет, делаем поворот на \(\alpha\), при этом \(\delta = 0\).
При \(\hat{x}\hat{y}\) получим: \(a_{11}'x'^{2} + a_{22}'y'^{2} + 2a_{13}'x' + 2a_{23}'y' + a_{33} = 0\)
\(\delta = \begin{equation*} \begin{vmatrix} a_{11} & 0 \\ 0 & a_{22} \end{vmatrix} \end{equation*} = a_{11}a_{22} = 0\)
Остается только один член:
\(a_{11}'x'^{2} + 2a_{13}'x' + 2a_{23}'y' + a_{33} = 0\). Дополним до полного квадрата по \(x'\)
\(a_{11}'\left(x'^{2} + 2\dfrac{a_{13}'}{a_{11}'}x' + \left(\dfrac{a_{13}'}{a_{11}'}\right)^{2}\right) - \dfrac{a_{13}'^{2}}{a_{11}'} + 2a_{23}y' + a_{33} = 0\)
\(a_{33}' = a_{33} - \dfrac{a_{13}'^{2}}{a_{11}'} \)
\( \begin{equation*} \begin{cases} \hat{x} = x' + \dfrac{a_{13}'}{a_{11}'} \\ \hat{y} = y' \end{cases} \end{equation*} \implies a_{11}'\hat{x}^{2} + 2a_{23}\hat{y} + a_{33}' = 0\)
\(y'' = \hat{y} + \dfrac{a_{33}}{2a_{23}} \implies a_{11}'\hat{x}^{2} + 2a_{23}'(\hat{y} + \dfrac{a_{33}'}{2a_{23}'}) = 0\)
Заменим: \(\hat{x} = x''\), \(\hat{y} = y'' - \dfrac{a_{33}'}{2a_{23}'}\)
Получим: \(a_{11}'x''^{2} = -2a_{23}'y''\)
Исходя из общего вида: \(a_{11}'x^{2} + 2py + q = 0\):
\(p = 0, \ q = 0 \implies x^{2} = 0\) - Вертикальная прямая
\(p = 0 \implies x = \pm \sqrt{\dfrac{q}{a_{11}}}\)
\(q = 0 \implies 2py = -a_{11}x^{2}\) - Парабола
Лекция 16.12.2022#
Приведение поверхности второго порядка к каноническому виду#
\(a_{11}x^{2} + a_{22}y^{2} + a_{33}z^{2} + 2a_{12}xy + 2a_{13}xz + 2a_{23}yz + 2a_{14}x + 2a_{24}y + 2a_{34}z + a_{44} = 0\)
Сделаем параллельный перенос : \( \begin{equation*} \begin{cases} x = x' + x_{0} \\ y = y' + y_{0} \\ z = z' + z_{0} \\ \end{cases} \end{equation*}\)
\( \begin{equation*} \begin{cases} a_{11}x_{0} + a_{12}y_{0} + a_{13}z_{0} + a_{14} = 0 \\ a_{12}x_{0} + a_{22}y_{0} + a_{23}z_{0} + a_{24} = 0 \\ a_{13}x_{0} + a_{23}y_{0} + a_{33}z_{0} + a_{34} = 0 \\ \end{cases} \end{equation*}\)
Если \(\Delta_{3} \neq 0 \implies\) Поверхность центральная, сделаем поворот системы координат и получим сумму квадратов \(a_{11}'x'^{2} + a_{22}'y'^{2} + a_{33}'z'^{2} + a_{44}' = 0\)
Классификация центральносимметричных поверхностей второго порядка#
Эллипсоид#

\(\dfrac{x^{2}}{a^{2}} + \dfrac{y^{2}}{b^{2}} + \dfrac{z^{2}}{c^{2}} = 1\)
Однополостный Гиперболоид#

\(\dfrac{x^{2}}{a^{2}} + \dfrac{y^{2}}{b^{2}} - \dfrac{z^{2}}{c^{2}} = 1\)
Двуполостный Гиперболоид#
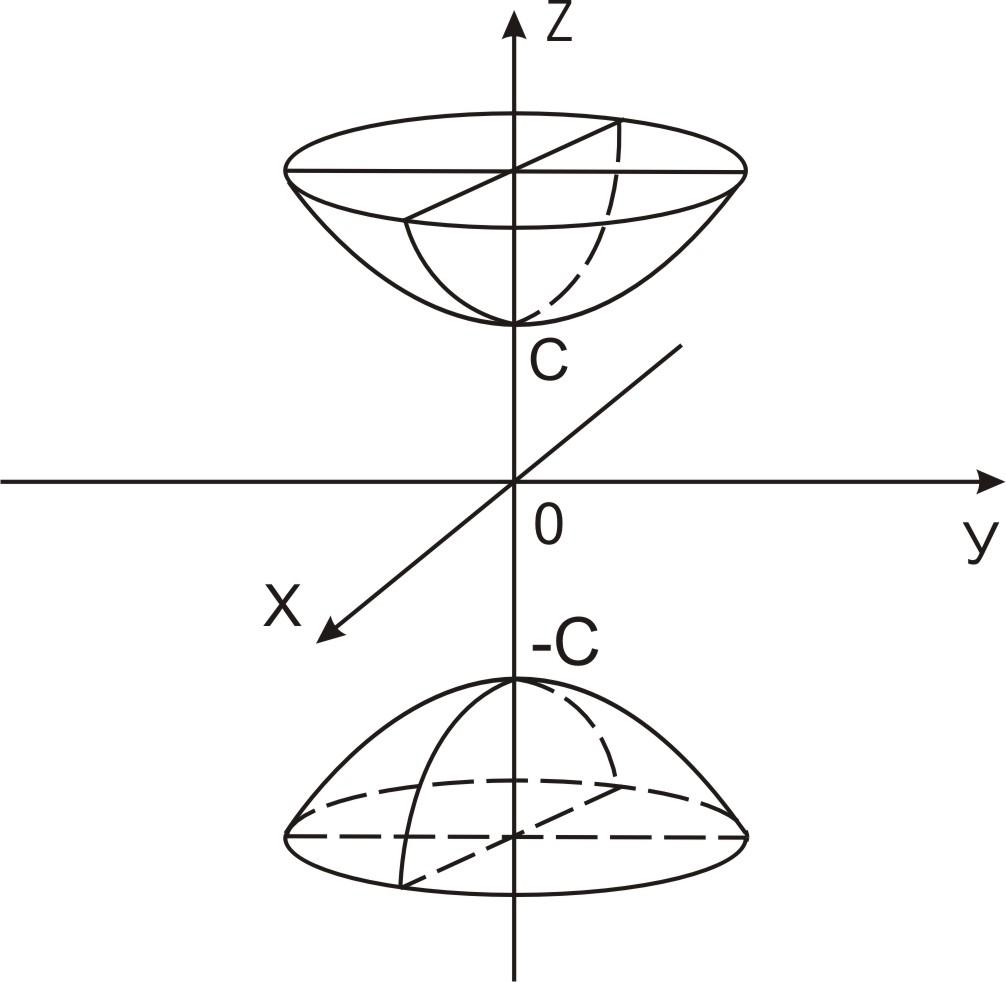
\(\dfrac{x^{2}}{a^{2}} + \dfrac{y^{2}}{b^{2}} - \dfrac{z^{2}}{c^{2}} = -1\)
Классификация нецентральносимметрических поверхностей второго порядка#
Эллиптический параболоид#
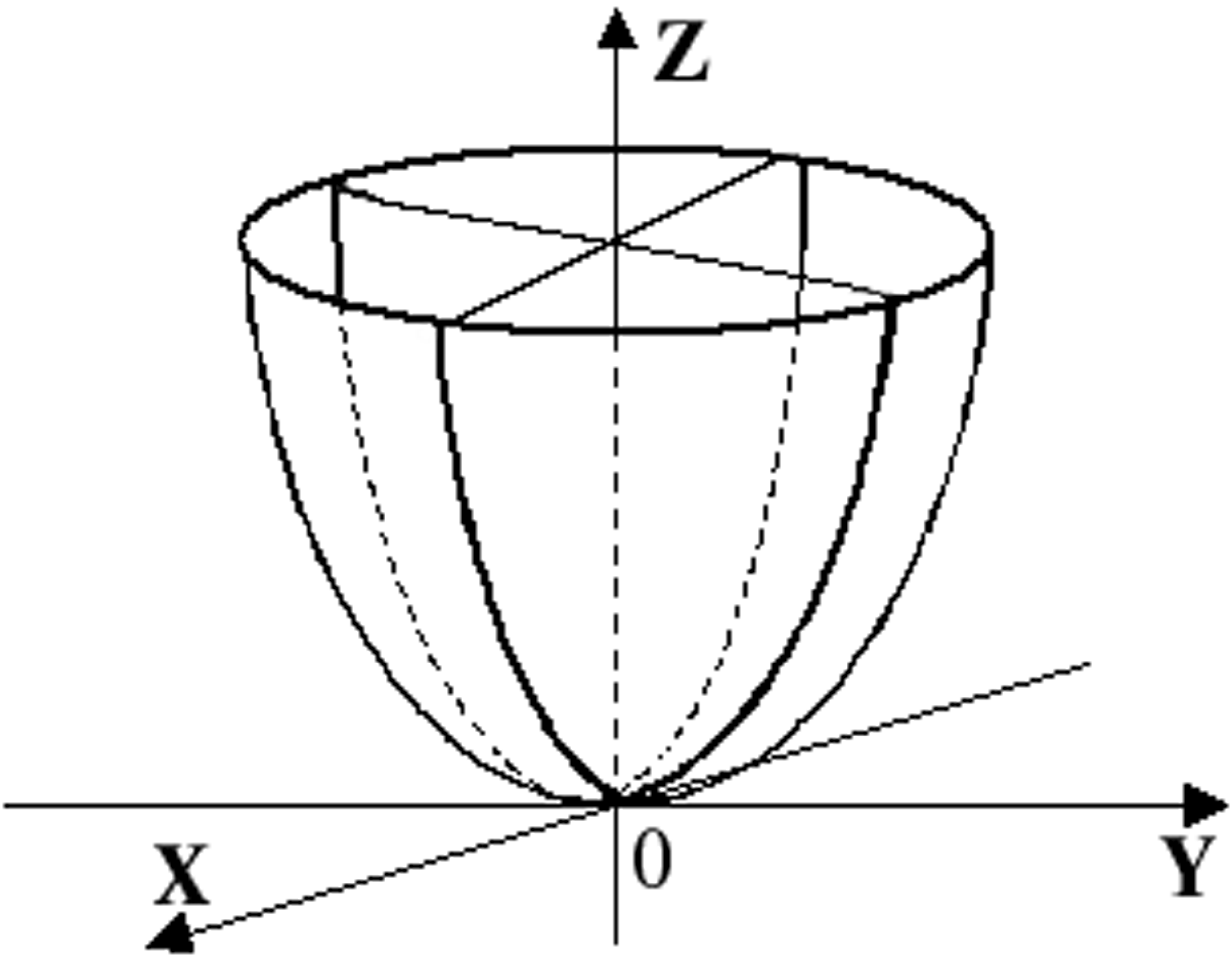
\(\dfrac{x^{2}}{a^{2}} + \dfrac{y^{2}}{b^{2}} = 2pz\)
Гиперболический параболоид#
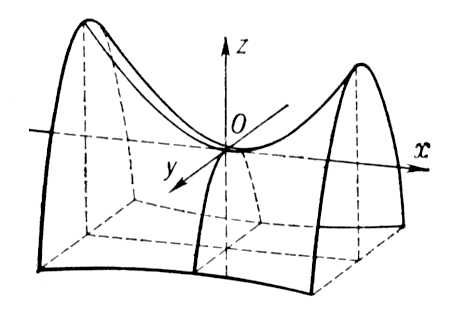
\(\dfrac{x^{2}}{a^{2}} - \dfrac{y^{2}}{b^{2}} = 2pz\)
Матрицы и определители#
Определение
Матрица - прямоугольная таблица размера \(m \times n\)
\(A = \begin{pmatrix} a_{11} & a_{22} & \dots & a_{1n} \\ a_{21} & \dots & \dots & a_{2n} \\ \dots & \dots & \dots & \dots\\ a_{m1} & a_{m2} & \dots & a_{mn}\\ \end{pmatrix}\)
Алгебраические операции с матрицами#
\(A + B = C, \ c_{ij} = a_{ij} + b_{ij}\)
\(\lambda A = C, \ c_{ij} = \lambda a_{ij}\)
\(AB = C, \ c_{ij} = \sum\limits_{k=1}^{n}a_{ik}b_{kj}\)
Диагональная матрица#
\(A = \begin{pmatrix} a_{11} & 0 & \dots & 0 \\ 0 & a_{22} & \dots & 0 \\ 0 & \dots & \dots & 0\\ 0 & 0 & \dots & a_{mn}\\ \end{pmatrix}\)
\(E = \begin{pmatrix} 1 & 0 & \dots & 0 \\ 0 & 1 & \dots & 0 \\ 0 & \dots & \dots & 0\\ 0 & 0 & \dots & 1\\ \end{pmatrix}, \ \forall A : AE = A, \ EA = A\)
Определитель матрицы#
Обозначение
\(det{A}\)
Определение
Определителем \(n -\) ого порядка квадратной матрицы называется сумма всевозможных произведений элементов матрицы, взятых по одному из каждой строки и столбца. Сумма произведений по всевозможным перестановкам из индексов элементов. Каждое такое слагаемое называется членом определителя, взятым со знаком \((-1)^{n}\), где \(n\) - четность перестановок из индексов элементов, составляющих член определителя.
\(det{A} = \sum\limits_{\sigma \in S_{n}} \operatorname{sgn}({\sigma})a_{1\sigma(1)}a_{2\sigma(2)}\dots a_{n\sigma(n)}\)
Перестановки#
Определение
Перестановка из некоторых чисел - упорядоченный набор этих чисел
\(\sigma = \begin{pmatrix} 1 & 2 & 3 & \cdots & n-1 & n \\ \sigma(1) & \sigma(2) & \sigma(3) & \cdots & \sigma(n-1) & \sigma(n) \end{pmatrix}\)
Если какую - то перестановку считать главной, то все остальные получаются из нее транспозициями (взаимное изменение мест двух чисел перестановки)
Четность перестановки#
Определяется количеством инверсий в этой перестановке
Инверсия перестановки#
Инверсией в перестановке является факт наличия чисел \(i < j, \ \sigma(i) > \sigma(j)\)
Утверждение
Одна транспозиция меняет четность перестановки
Правило вычисления определителя#
\(det{A} = \sum\limits^{n}_{i = 1} a_{ij} \cdot A_{ij}\)
\(a_{ij}\) - элемент \(A\)
\(A_{ij}\) - алгебраическое дополнение \(a_{ij}\). Получается вычеркиванием \(i\) строки и \(j\) ого столбца
Определение минора#
Определитель \(M\) \((n - 1)\) порядка называется минором \(a_{ij}\) и алгебраическим дополнением \(A_{ij} = (-1)^{i + j} M\)
Упрощение определителя на основании его свойств#
При транспонировании определитель не меняется
\(det{A} = 0\), если в квадратной матрице имеются одинаковые или пропорциональные строки
Если каждый элемент строки домножить на \(\lambda\), то получим \(\lambda det\)
К любой строке можно прибавить другую строку с произвольным множителем и определитель не изменится
Если строки в квадратной матрице поменять местами, то опредлеитель изменит знак